Généralement les moteurs utilisés dans les
quadrotors sont des moteurs à courant alternatif.
La dynamique du rotor est donc approximée à celle
d'un moteur à courant alternatif, elle est donnée par les
équations différentielles suivantes :
Avec : ???????? est le couple d'entrée, et ???????? =
????????????2 est le couple résistant généré par le
rotor i.
Pour atteindre les objectifs de la commande d'un quadrotor, une
boucle d'asservissement en vitesse est souvent nécessaire. D'abord, nous
avons besoin de déterminer les vitesses désirées
????????,????
correspondantes aux valeurs des commandes fournies par le
contrôleur, ces vitesses peuvent être calculées comme suit
:
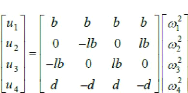
????~???? = ????-1???? (II.40)
Avec: ????~???? = (????????12 , ????????22 , ????????32 ,
????????4
2 ), ???? = (????1,????2,????3,
????4)????, et ???? est une matrice non
singulière, elle est obtenu à partir de (II.36).
L'objectif est de synthétisé un contrôleur
pour que ???????? ? ????????,???? lorsque ???? ? 8 en utilisant les
couples???????? .
On définit l'erreur de vitesse :
?b??~???? = ???????? - ????????,???? (II.41)
Une loi de
commande est développée dans [1-2], elle est donnée par
:
???????? = ???????? + ?????????????????,???? - ????????????~????
(II.42)
Avec ????????, i ?{1, 2, 3,4}sont des gains positifs.
On remplace la loi de commande dans (II.39), on obtient :
Chapitre II Modélisation dynamique d'un
quadrotor
26
Cette relation représente la dynamique de l'erreur, elle
nous montre la convergence exponentielle de
toi vers toi
lorsquet - 00. Sa signifier la
convergence des commandes du quadrotor vers ces valeurs désirées,
ce qui assure la stabilité du quadrotor.
En réalité le quadrotor est commandé par
les tensions d'alimentation de ces quatre moteurs. Pour commander ces moteurs,
nous avons besoin d'obtenir la tension d'entrée de chaque moteur.
Supposant que l'inductance du moteur est petite, et considérant que les
moteurs utilisés sont identiques, nous pouvons obtenir la tension
d'entrée de chaque moteur comme suit :
(II.43)
????????
KmKg
Avec : Ra est la
résistance du moteur, Km est la
constant du couple de moteur, Kg est le
gain du réducteur.
Vi = Ti + KmKgtoi
Chapitre II Modélisation dynamique d'un
quadrotor
27
II.3. Conclusion :
Ce chapitre permet au lecteur de comprendre les bases
physiques utilisées pour déterminer les équations de la
cinétique et la dynamique des quadrotors, ainsi que les forces et les
moments agissantes. L'utilisation du formalisme de Newton-Euler nous a permet
d'établir le modèle dynamique du quad rotor. La complexité
du modèle, La non linéarité, et l'interaction entre les
états du système, peuvent se voir clairement. Les
résultats des formules précédentes sont utilisés
généralement pour établir un modèle
mathématique permettant de décrire avec précision le
comportement du système. Dans le prochain chapitre, je vais expliquer
brièvement le hardware et le software utilisé dans la
réalisation du quadrotor.