Chapitre III : Spécification et
modélisation d'une solution à base de SMA
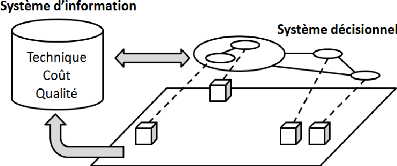
Figure 56: Décomposition systémique
d'un système de pilotage
7. APPROCHE GENERALE
Notre solution propose de résoudre l'allocation des
machines d'HPLC comme première étape d'une gestion de cycle de
vie. Nous partons du principe qu'il faut développer des comportements et
des structures de données génériques pour le produit qui
pourra alors utiliser ces outils pour résoudre les problèmes
qu'il rencontrera plus en aval ou plus en amont dans son cycle de vie.
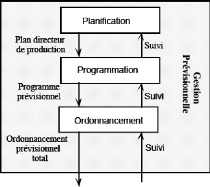
7.1. Fonctions prévisionnelles de gestion de production
Selon (DOUMEINGTS 1990), les fonctions classiques
associées au niveau prévisionnel sont :
· La planification: Cette fonction
définit le plan directeur qui constitue un compromis entre les objectifs
commerciaux, financier et de production.
· La programmation: Cette fonction
élabore à partir du plan directeur un programme
prévisionnel de production et calcule l'ensemble des besoins en fonction
des en-cours et des stocks.
· L'ordonnancement: Cette fonction
définit l'ordonnancement prévisionnel total dans le cas où
celui-ci est nécessaire, dans le cas où aucun ordonnancement
n'est requis, cette fonction est inexistante). Elle décrit ainsi
l'utilisation des ressources matérielles et humaines. Les besoins en
approvisionnement sont estimés de manière plus fine.
78
Chapitre III : Spécification et
modélisation d'une solution à base de SMA
L'agencement de ces fonctions permet de définir la gestion
prévisionnelle.
Environnement extérieur
Figure 57 Fonction de gestion
prévisionnelle
7.2. Produit actif
Nous proposons une distribution de la prise de
décision. Celle-ci semble bien adaptée à notre
système. Cette approche fait évoluer des entités
indépendantes dans un environnement qu'elles perçoivent et sur
lequel elles peuvent agir.
« Ces entités ont un droit d'accès aux
ressources, un droit d'accès mutuel entre elles, un mode de
fonctionnement indépendant et doivent se conformer aux règles de
fonctionnement du système global. Elles sont motivées par un but
précis pour lequel elles existent et peuvent requérir la
coopération d'autres entités pour atteindre ce but »
(BLANC & CASTAGNA 2006)
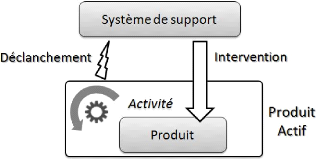
Figure 58: Graphe systémique du produit dit
« actif »
79
Chapitre III : Spécification et
modélisation d'une solution à base de SMA
La technologie des systèmes multiagents fournit un
cadre approprié pour implémenter une telle structure. Les
mécanismes de coordination peuvent être de type tableau noir (un
espace librement accessible sur lequel chaque entité peut
échanger des informations) ou de type protocole de communication direct
(exemple: contractnet Protocol).
7.3. L'approche hétérarchique
« Le substantif hétérarchie (en
anglais, « Heterarchy ») et son adjectif hétérarchique
(en anglais, « hierarchical ») constituent des néologismes
à la fois en français et en anglais. Ce terme a été
formé à partir de deux termes grecs : Heteros (autre) et Arckhein
(commander), signifiant ainsi à l'origine commandement par les autres.
» (Trentesaux 2002)
La première utilisation de ce terme est
attribuée à W. S. McMULLOCH dans le domaine biomédical en
1945 dans l'objectif de décrire l'organisation circulaire dans les
réseaux de neurones : soient trois liaisons neuronales A, B C.
A influe sur B et B influe sur C. Si A influe sur C, alors A
est au sommet de l'organisation hiérarchique, si C influe sur A, alors
l'ensemble forme une organisation hétérarchique, nommée
hétérarchie.
Depuis, ce terme a été repris et utilisé
dans de nombreux domaines, en particulier dans celui de la cybernétique.
Dans tous les cas, l'hétérarchie renvoie à l'idée
d'acteurs différents qui assument, en collégialité, la
coordination d'une action collective donnée et s'oppose par essence au
terme hiérarchie.
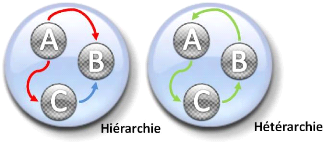
Figure 59: Hiérarchie et
hétérarchie dans un système de neurones
(McMULLOCH)
80
| 
