III-4-6. Commande par imposition des pôles
Pour poursuivre des trajectoires de référence de
couple z1 ref et de flux z2ref, les entrées v1, v2
peuvent être calculées de la façon suivante [24,26,27].
Les équations d'erreur de poursuite deviennent :

e
= -
z
1ref
z
1
1
=
(III-32)
e
-
2
z
2ref
z
2
e k e k
& & &
2 22 2 21
+ +
e 0
=
2
(III-33)
Où les constantes k11, k21, k22 sont choisis tel que
k11 + Set 2
k 21 + k 22 S + Ssont des
polynômes d'Hurwitz.
III-4-7. Structure de la commande non linéaire en
vitesse
Nous utilisons un correcteur IP ou PI avec anti-windup, afin de
compenser les variations du couple et le contrôle de la vitesse.
=
1ref s
( Ù ref - Ù )- p Ù
k
(III-34)
z
k i
Les coefficients ki, kp sont choisis par un placement
des pôles.
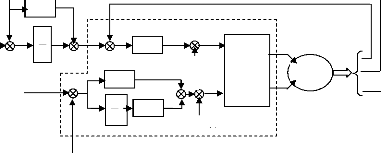
Les équations (III-19), (III-27) et (III-31) sont mises
sous forme de schéma fonctionnel Fig. III-6
?r
Ce
?ref
-
Kp
ki s
-
-
Ö2 r
d
d
K21
-
K11
K21
V1
V2
Lfh1(x)
L2fh2(x)
-
D-1 (x)
CNL
Vâs
Vás
MAS
Fig. III-6. Schéma bloc de la commande non
linéaire de la machine
asynchrone alimentée en
tension
III-5. Simulation
Nous avons établi une commande de linéarisation E/S
par retour d'état non linéaire pour une machine asynchrone
alimentée en tension conformément en schéma bloc suivant
:

Fig III-7. Schéma bloc de simulation de la
commande non linéaire de la machine
Asynchrone alimentée en
tension
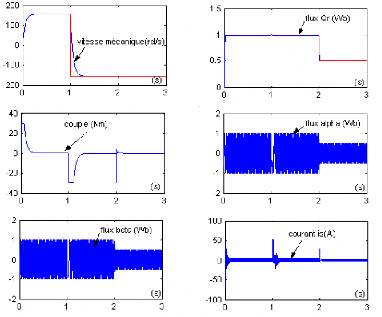
Fig III-8. Réponses aux échelons de
vitesse #177; 156rd/s avec variation du flux de1Wb
à
0.5 Wb de la commande non linéaire de la machine asynchrone
alimenté en tension
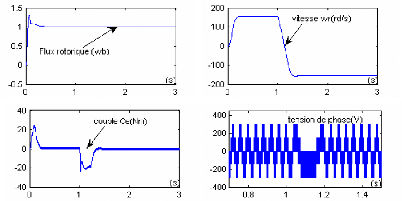
Fig III-9. Réponses aux échelons de
vitesse #177; 156rd/s de la commande non
linéaire de la
machine asynchrone alimentée en tension avec
convertisseur
III-6. Interprétation des résultats de
simulation
Les résultats de simulation (Fig.III-8 et Fig.III-9)
montrent de bonnes performances pour le flux et du couple (vitesse). Il n'y a
aucune interaction entre les deux axes, ce qui prouve le découplage
dynamique entre les deux variables.
Pour le mode normal, nous remarquons une réponse en
vitesse sans dépassement et sans erreur statique. La réponse en
vitesse et le rejet de perturbation sont contrôlés par un
régulateur IP en cascade avec un régulateur P pour le couple. La
réponse en vitesse est satisfaisante. Le flux est contrôlé
par régulateur classique PD et suit sa consigne avec une constante de
temps faible.
III-7. Conclusion
Dans ce chapitre, nous avons présenté la commande
non linéaire appliquée à la machine asynchrone
alimentée en tension associée à un convertisseur
statique.
Le changement de coordonnées non linéaires et une
contre réaction NL ont permis de ramener le comportement non
linéaire du système à un sous système
linéaire.
Le rejet de perturbations et le découplage (du flux et du
couple) sont acceptables.
Cependant le couple présente une fonction NL
dépendant du courant Iqs et du flux ce qui présente un
inconvénient pour cette technique de commande et lui exige à
travailler de zéro à vitesse nominale. Pour contourner ce
problème on fait appel à la commande NL qui peut découpler
complètement et permet à la machine de fonctionner pour n >
nn.
Ainsi, le chapitre suivant sera consacré à cette
technique de commande NL basée sur la linéarisation
entrée-sortie.
| 

