IV-5 Simulation
Le schéma bloc de simulation sous Matlab/Simulink est
illustré par la figure IV-1
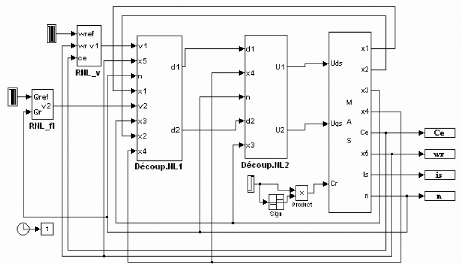
Fig IV-1. Schéma bloc de simulation de la
commande non linéaire avec orientation du
flux de la MAS
alimentée en tension
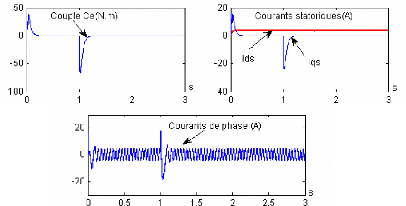
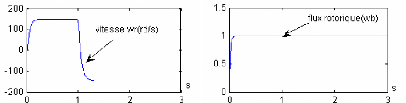
Fig IV-2. Réponses aux échelons de
vitesse #177; 156rd/s de la commande non
linéaire
de la machine asynchrone alimentée en
tension
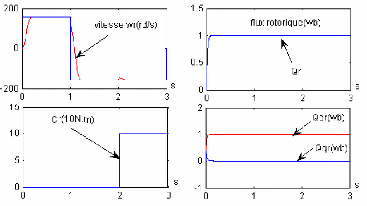
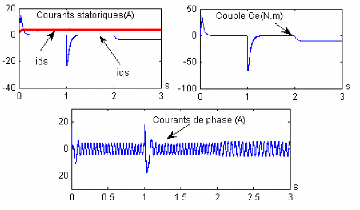
Fig IV-3 Réponse aux échelons de
vitesse#177; 156rd/s de la commande non
linéaire
de la MAS avec application d'une
charge
IV-6. Interprétation
Les résultats de simulation fig.IV-2 et fig.IV-3,
montrent de bonnes performances pour le flux et le couple (vitesse). Il n'y a
aucune interaction entre les deux axes, ce qui prouve le découplage
dynamique total entre les deux variables.
D'autre part, le flux Ö r est orienté
dans la direction `d' ( Ö dr= Ö r ; Ö qr = 0).
Les réponses en vitesse sont sans erreur statique, sans
dépassement et avec un rejet de perturbation très rapide
IV-7. Conclusion
Dans ce chapitre, nous avons présenté la commande
non linéaire appliquée à la machine asynchrone
alimentée en tension avec orientation du flux.
Le changement de coordonnées non linéaires et une
contre réaction NL ont permis de ramener le comportement non
linéaire du système à un sous système
linéaire.
Le rejet de perturbations et le découplage (du flux et du
couple) sont acceptables.
Le flux jusqu'ici est supposé mesurable or dans la
réalité, il est difficilement accessible.
Généralement on fait appel aux observateurs ou estimateur de
flux. Ainsi, le chapitre
suivant sera consacré aux observateurs à mode
glissant.
| 

