CHAPITRE V
COMMANDE NON LINEAIRE AVEC OBSERVATEUR
DU FLUX PAR MODE GLISSANT ET ESTIMATEUR
DE VITESSE ROTORIQUE
CHAPITRE V: COMMANDE NON LINEAIRE AVEC
OBSERVATEUR DU FLUX PAR MODE GLISSANT ET
ESTIMATEUR DE VITESSE ROTORIQUE
V-1. Introduction
Les observateurs non linéaires ne sont pas très
développés devant les observateurs linéaires.
Cependant, les chercheurs s'étaient
intéressés à développer des observateurs pour les
systèmes ayant une non linéarité régulière
ou quelques cas pratiques comme le système des flux rotorique et
statorique au sein de la machine asynchrone. Grâce aux
propriétés importantes des systèmes à structure
variable, les chercheurs ont pensé aux observateurs basés sur
l'approche du mode de glissement. Ces observateurs ont la même structure
avec les observateurs classiques.
Dans ce chapitre, il est présenté le concept
général de la commande non linéaire de la machine
asynchrone avec observateurs de flux rotorique et de vitesse. Dans ce contexte,
nous étudions un observateur non linéaire d'ordre réduit
avec terme correctif classique et un observateur non linéaire par mode
de glissement.
Ensuite, nous présentons quelques applications possibles
de ces observateurs pour la commande non linéaire de la machine
asynchrone.
V-2. Association Machine- Observateur en boucle
ouverte
La théorie des observateurs est beaucoup plus
développée pour les systèmes linéaires par rapport
aux systèmes non linéaires. Les observateurs non linéaires
n'ont pas une structure générale. Dans la littérature nous
trouvons plusieurs types d'observateurs non linéaires. Cependant, chacun
est le meilleur pour un système donné [28,29].
Dans cette section, nous nous intéressons à
l'étude des observateurs particuliers concernant l'observation du flux
rotorique.
V-3. Observateur non linéaire classique
V-3-1. Etude de l'observateur
Cet observateur concerne l'estimation du flux rotorique au sein
de la machine asynchrone. Considérant le système suivant
M? 1 ?
? - Ö + ù Ö ?
T dr sl qr ?
r ?


M ? 1 ?
= + - ù Ö - Ö
(V-1)
i ? ?
qr T
qs sl dr
? qr
T ?
r ? r ?
Ce système peut être écrit sous une forme
réduite comme suit :
Ö = + ? - + ù
1
r I J
M ? Ö
I ? sl r
? (V-2)
s
T r ? Tr ?
? 1 0? ? -
0 1 ? ? Ö ?
dr ? I ds ?
I , ??
= 0 1 J , ?
r , ?
?? ? ? = 1 0 Ö = I
?? ? = ?
? Ö s I
qr ? ? qs ?
Une première estimation du flux Ôr peut
être déduite de l'équation (V-2).

M
+
I
s
(V-3)
r
T
r
? 1 ?
? - - ù
I J ? Ö à
?sl
T ?
? r ?
à
Ö
Il est supposé que la pulsation ùsl et
le courant statorique Is sont des quantités connues
(mesurable).
L'erreur d'estimation du flux rotorique est donnée par
:
e=Öà- Ö (V-4)
r r
L'erreur est gouvernée par l'équation suivante
& = ? - - ù (V-5)
1
e sl ?
? I J .e
?
? T r ?
Pour une pulsation de glissement ùsl
donnée, le système (5.6) possède deux valeurs propres
Ø1,2 tel que:
Ø = -
1,2 j
1 #177; ù (V-6)
sl
T r
Les deux composantes du flux observé évoluent
suivant un mouvement oscillatoire amorti
avec une pseudo-pulsation ùsl et un taux
d'amortissement
1 [29,30].
Tr
En multipliant les deux membres de l'équation (V-5) par
t
2e et connaissant que :
2ete&= t (V-7)
d ( e e)
dt
Et etJ e = 0, il résulte :
2
t
d ( ) ( e e)
t = - &
e e
Tr
dt
(V-8)
Cette procédure représente réellement la
stabilité par la théorie de la fonction de Lyapunov
[30,31]
Cette méthode d'estimation est incapable d'annuler
l'erreur dans le cas ou les paramètres du modèle sont
imprécis. Le principe de reconstruction consiste donc à corriger
la dynamique en tenant compte de l'erreur entre la sortie mesurée et la
sortie estimée. De plus l'erreur converge rapidement à cause de
la boucle de retour.
La philosophie de l'observateur consiste à ajouter
à l'estimateur (V-3) un terme correctif dérivé de la
prédiction de l'erreur [30].
? 1 ?
à & M
Ö = - - ù
? I J Ö à + + -
? I K V Và (V-9)
s ( s s )
?
sl r
T ? T
? r ? r
Avec

M
V
L
r
s
M
ù
J Ö
L
r
s
r
& &
Ö + ó
L
r s
+ - óù +
( )
R I L J I
s s s s
I
s
(V-10)
|
à
V
s
|
M L
r
|
&
à
Ö + ó
L
s
|
&
I
s
|
( ) s r
M
+ - óù + ù Ö
R I L J I J à
s s s s L
r
|
Vs : représente le vecteur des tensions
mesurées ((Vds, Vqs) t),
à
Vs : représente le vecteur des tensions
observées,
K : représente le gain de l'observateur (matrice 2x2).
Après un calcul intermédiaire, le système
(V-5) devient dans ce cas de la forme suivante :
|
Avec
|
&
e
|
? 1 ? M
= - - ù (V-11)
? I J ? e - &
Ke
? T r ? L
? r ? r
|
M
ù = ù + K ù (V-12)
r sl L
s
r
L'erreur est gouvernée par :
- 1
? M? ? 1 ?
e I
& = +
? K ? ? - - ù
I J ? e (V-13)
? r
L ??T ?
? r ? ? r ?
Pour une valeur précise du gain K, l'erreur suit une
dynamique correspondante. Pour la simplification, nous supposons :
K=kI (V-14)
Avec k est un scalaire
Si la vitesse de glissement ùsl est constante,
le système (V-13) devient linéaire ayant les valeurs propres
suivantes :
- 1
? M ? ? 1 ?
Ø = +
1 k (V-15)
? ?
1 , 2 j
? ? - #177; ù
? L ? ? r
T ?
? r ? ? r ?
Nous constatons que nous pouvons agir sur la rapidité de
convergence de l'erreur en
|
agissant sur la constante
|
- 1
? + par le biais du gain d'observation « k »
M ?
? 1 k ?
? L r ?
|
Nous procédons comme précédemment pour
démontrer la stabilité de cet observateur, l'équation
(V-8) prendra la forme suivante :
? 1
= - ? + M
t t
d ( ) ( e e)
? ? &
e e 2 1 k
?L T
r ? r
- 1
dt
(V-16)
= ? + M ?
? I k ?
r ? L r ?
1
( s s )
z kL I
- ó
Ö à
-
(V-19)
M
La fonction de Lyapunov diminue suivant la constante de
temps ?
T 1 k . Il est
? + ?
r L
?
? r ?
possible de choisir le gain « k » de façon
à imposer cette constante de temps considérablement petite devant
Tr.
Afin d'éviter le calcul des dérivées dans
l'expression (V-10) qui amplifient les erreurs, Dote nous a proposé une
méthode basant sur un changement de variable [32]. La variable
auxiliaire « z »est définie par :
= ? + (V-17)
M ?
z I k Ö + ó ? ? à kL I
r s s
? L r ?
Tenant compte de l'équation (V-14), la
dérivée de « z » aura la forme suivante :
? M ? ? 1 ?
z & = - - óù
? I kR I kL J ? I + - ù
? I J à kV
Ö +
? (V-18)
? s s s s
? r r s
T ? T ?
? r ? ? r ?
Avec :
Par substitution de (V-19) dans (V-18), nous retrouvons le
système différentiel final pour le calcul du vecteur « z
» tel que :
? ?
1 ? ?
M
? + - + óù + - ù
( ) r o s s s
? 1 ?
& = - ù
z I J k z ?
? I k R I L J ? I J k kL I kV
? ?
+ ó + (V-20)
? r o s s s
T ? ? T ? T ? ?
? r ? ? r ? r ? ?
? ?
?
M ? ? 1
Avec k
I k
+
o L
r ?
Ce système peut être résolu pour n'importe
quelle condition initiale z (0) impose par le
|
à
choix de Ö r (0)
|
. L'estimation de r
Öà peut être déduite après le
calcul de « z » à l'aide de
|
l'équation (V-19) sans calcul des
dérivées.
Remarque
La dynamique de l'observateur doit être plus rapide que
celle du système à observer. Cela exige un bon choix du gain.
V-3-2. Simulations
L'observation du flux est établit en utilisant le bloc de
simulation suivant :
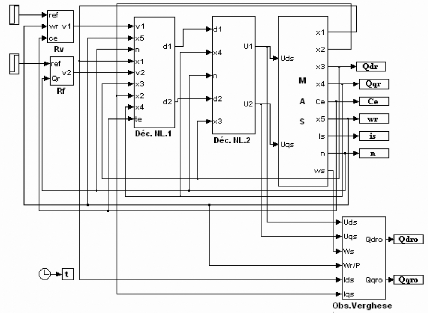
Fig V-1. Schéma de simulation de la commande
non linéaire de la MAS Avec observateur non linéaire classique
(Verghese) du flux rotorique
| 
