V-3-3. Résultats de simulation
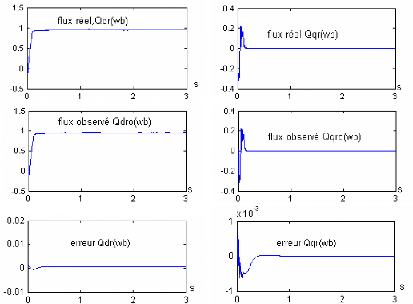
Fig V-2. l'évolution des flux réels et
observés et l'erreur d'observation
Nous avons simulé le comportement de l'observateur du
flux rotorique en utilisant le schéma de la figure V-1. La simulation
effectuée dans la figure V-2 montre l'évolution des flux
réels et des flux observés dans la machine. Nous remarquons que
les flux observés convergent rapidement vers les flux réels et ne
les quittent pas ultérieurement.
V-4. Observateur par mode de glissement
A cause des caractéristiques inhérentes aux
systèmes non linéaires, l'estimation de l'état de ces
systèmes continue à poser des problèmes difficiles. Dans
ce fait les chercheurs ont été orientés vers le
développement des observateurs d'état pour les systèmes
non linéaires et/ou incertains. L'observateur par mode de glissement
(Sliding Observer) est dérivé de la théorie des
systèmes à structure variable. En effet, cette dernière
s'adapte considérablement avec les systèmes non linéaires
et incertains. [28]
V-4-1 Structure générale d'un observateur par
mode glissant
Considérant le système non linéaire suivant
:
x & =f(x,u,t) (V-21)
Considérant aussi le vecteur y des variables mesurables
qui sont reliées linéairement avec les variables d'état
;
y = Cx (V-22)
Si le système est observable, l'objectif de l'observateur
est de donner la meilleure estimation des variables d'état à
partir des mesures sur la sortie y et l'entrée u.
Nous définissons l'observateur par la structure suivante
[33] :
xà = f(xà ,y,u,t)+Ëu s
& (V-23)
Avec :
xà est de même dimension que x(n)
à
f est le modèle d'estimation
Ë est la matrice des gains de dimension n x r (r est la
dimension de u) u s est un vecteur définit par
u= sign (s ) sign (s ) K sign (s )
[ ]t (V-24)
s 1 2 r
et
[ss s ] t S [ y C xà ]
2 K r = = - est une matrice carrée (r x r) à
déterminer.
Nous définissons aussi le vecteur d'erreur e = x
-xà en soustrayant les équations (V-23) et (V-21), ensuite nous
obtenons :
e&=Äf-Ëu s
Avec
Äf = f(x, u, t) - f(xà, y, u, t) (V-25)
Le vecteur surface S=0 est attractif, si :
&
S i S i < 0 pour i= 1, r (V-26)
Durant le mode de glissement, le terme de commutation (V-24)
est nul. Car le vecteur surface et sa dérivée sont nuls (S =
& S = 0). La grandeur équivalente du terme de commutation est
donnée comme suit :
C( Ä f - Ë s = (V-27)
i ) 0
D'ou
u ( C ) C f
~ 1
s = Ë - Ä (V-28)
La matrice C Ë doit être inversible. Cela constitue
la première exigence sur le choix de Ë et . La dynamique de
l'erreur est gouvernée par l'équation (V-29).
ds
&
i
1 1
= -ë + ù + Ö + ù Ö + v
ds ds s qs dr r qr
k
i i k
T ó L
r s
&
i
1 1
= -ù - ë - ù Ö + Ö +
i i k k v
qs s ds qs r dr qr qs
T ó L
r s
ë i
ds
-
ù
s
-
M
1
à
-
-
k k
+
T
ë i
qs
Ö
dr
ù
r
i
ds
r
i
qs
-
de l'erreur vers zéro.
V-4-2 Observateur par mode de glissement (MG) du flux
rotorique
L'objectif de l'observateur est d'estimer les flux rotoriques et
Ôdr et Ôqr et les courants statoriques
connaissant la mesure des courants et les tensions statoriques et la vitesse de
rotation. Le vecteur sortie utilisé pour l'estimation est donné
par :
|
?1
= = ?
y C x
? 0
|
0
1
|
0
0
|
0
0
|
0 ?
? x
0 ?
|
(V-30)
|
Considérant maintenant le système du moteur
asynchrone tenant compte des variables ids,
à à à à
iqs, Ôdr, Ôqr. Les variables à observer sont i
ds , i qs , Ö dr , Ö qr .
Nous donnons ainsi le modèle du
système à observer et le modèle
d'observation. Le système à observer est :
Ö& = M - Ö + ù Ö
1
dr T
i (V-31)
ds d r sl qr
T r r
1
1
Ë
1
+
ó
+
v
ds
u
s
L
s
1
2
Ë
1
+
ó
+
v
qs
u
s
L
s
Le modèle de l'observateur est :
Ö&
qr T
= M - ù Ö - Ö
1
i qs sl dr qr
T r r
à
i
ds
-
1
T
r
1
Ö + ù Ö
k
dr r
Ö
qr
qr
à
à
&
à
i
ds
&
à
i
qs
&
à
Ö
dr
Ö à &
qr
+ ù +
i k
s qs
T
r
M
T
r
T
r
ù
sl
à à
u
s
1
+ Ë
2
+ù
sl
Ö
dr
Ö
qr
2
à
à
1
-
u
s
+ Ë
2
Ö
dr
T
r
Ö
qr
(V-32)
56
Avec k M
ó L s L r
R R M 2
, 2
s r
ë = +
ó L ó L L
s s r
? Ë 1 ?
, ?
Ë = 2
2
2
? ?Ë 2 ?
Nous définissons la matrice des gains comme suit :
Ë 1
? ?
Ë i = Ë Ë pour i = 1,2 et j = 1,2 avec ?
j [ 1 2 ] Ë = 2 1
1 ? ?Ë 1 ?
Pour en avoir l'erreur d'observation, nous soustrayons (V-32) de
(V-31)
u
s
2
u
s
1
Ö
dr
ù
sl
-
qr
T
r
qr 2
& 1
i k
= Ö + ù Ö - Ë
k
ds T dr r qr
r
& 1
i k k
= -ù Ö + Ö - Ë
r dr qr
T
r
Ö = -
& 1 Ö + ù Ö - Ë 1 u
(V-33)
T
qs
1
1
dr dr sl qr 2 s
1 Ö - Ë
-
Ö &
2
u
s
r
Avec [ ]t
u s = sign (s 1 ) sign (s 2 )
? s ?
et ( y yà )
S =
1 ?? = -
?? s 2
Le vecteur d'erreur est : e = [ IS Ö r
]
Posons les représentations matricielles suivantes :
1
k
?
? T
C = [ 0 1] ,
? - ù
k k ?
r
? ?
k ù r
? ? ?
?
1
ù sl
-
-
-
T r
T r
? ? ? ? ? ?
1
A 2
ù sl
Le système (V-33) devient :
Ö = A
&
2 Ö r - Ë 2 u
1
s

I s = A 1 Ö r - Ë 1 u
&
1
s
(V-34)
La surfaceS=(y- yà )=y, d'où S=Is
(V-35)
? ä
Ë = + Ë - -
1 1 1
2 2 1 0
(Q A ) ?? ä
2
0
La fonction de Lyapunov est :
V t
1
= > 0 (V-36)
S S
2
D'où la dérivée V& ,
&
V & = S t I (V-37)

s
Notons que d dt doit être nulle.
Après un calcul intermédiaire, nous obtenons :
V & = S t A Ö - S Ë u
t 1 (V-38)
1 r 1 s
? ä ?
En posant ??
1 0 , il suffit de vérifier la condition (V-39) pour
satisfaire la
Ë =
1 0
?? ä 2
condition d'attractivité des surfaces.

ä 1S1 + ä
2S2 > S A Ö (V-39)
t
1 r
La détermination des gains se fait selon deux
étapes.
· La première consiste à satisfaire la
condition d'attractivité.
Ë = - 1 1
? ä
1 0
??
|
0
ä 2
|
?
??
|
(V-40)
|
|
· La deuxième consiste à imposer pour
l'erreur une dynamique de convergence exponentielle.
Lorsque le régime de glissement est établit
(Is = 0
& et I s = 0), nous avons :
~ = Ë - Ë Ö (V-41)
u s 1 1 1 r
Par substitution, l'erreur sur Ö r devient :
Ö & r = - - A 2 + Ë 2 Ë
- 1 A Ö
( 1 ) r
1(V-42) Pour que l'erreur converge exponentiellement,
nous devons poser :
Ö r = - QÖ r (V-43)
? q 0 ?
Avec ??
Q , q 1 , q2 sont des constantes
positives
1
= ?? 0 q 2
D'où :
Pour une raison de simplification, nous posons :
=Ë (V-45)
- 1
1
La condition d dt = 0 est vérifiée en
considérant que la vitesse est suffisamment lente
devant la dynamique de l'observateur. Ce qui en résulte
:
? ä 0 ?
1
Ë = A (V-46)
1 1 0
??ä ??
2
? ä 0 ?
1
Ë = -
(Q A ) (V-47)
2 2 0
?? ä ??
2
Par développement, nous obtenons :
? 1 ?
k - ù
k
? r ?
T r
? ?
? ?
( ) ?
2 k k
ù
+ ù
k r
r ? ? T r ?
2 ? 1 ? ? k ?
? Tr ?
1
1 (V-48)

? ? ? ? ? ?
1
k ù r
Ë1
T r
1
ä ä
1 k 1
T r
ä ù ä
2 r 2
k k
(V-49)
? - 1 ?
? q ?
? T r ?
ä ù
2 sl
?
ä ù
1sl ?
?
? ?
ä ? - 1
? q ?
2 2 ?
? T r ? ?
ä 1
Ë1
-
(V-50)
Ainsi, la condition d'attractivité devient comme suit :

ä 1 1 + ä 2 2 > Ö (V-51)
S S S t r
La dynamique de l'observateur doit être plus rapide que
celle du système à observer. Cela exige un choix convenable des
constantes ä 1 , ä 2 , q1,
q2.
| 

