V-4-3 Schéma de simulation
Nous simulons le comportement de l'observateur du flux rotorique
en utilisant le schéma de la figure V-3.
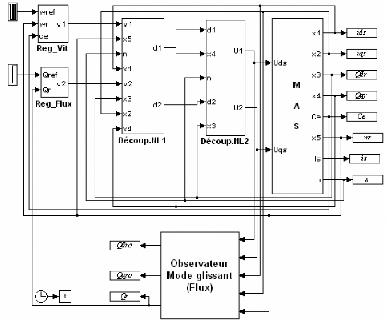
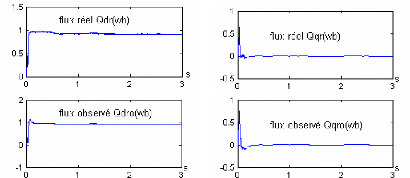
Fig V-3. Schéma de simulation de la commande
non linéaire de la machine
Asynchrone avec observateur par mode de
glissement du flux rotorique
A- Observation du flux rotorique de la MAS
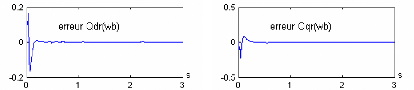
Fig V-4. L'évolution des flux observés
et l'erreur d'observation
Afin d'éviter le problème de chattering
la partie discontinue est adoucie par la forme à un seul seuil. Ceci
diminue l'invariance vis-à-vis les variations paramétriques. Les
paramètres de l'observateur sont regroupés dans le tableau
V-1.
La simulation effectuée dans la figure V-4 montre
l'évolution des flux réels et des flux observés de la
machine. Nous remarquons que les flux observés convergent rapidement
vers les flux réels et ne les quittent pas ultérieurement.
|
ä1
|
ä2
|
q1
|
q2
|
å1, å2
|
|
5
|
5
|
20
|
20
|
1
|
Tableau V-1. Paramètres de l'observateur MG
B- Réglage du flux rotorique de la MAS avec observateur
MG
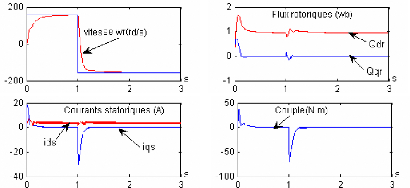
Fig V-5 Réglage du flux rotorique avec
observateur MG
La figure V-5 montre les résultats de simulation du
réglage du flux rotorique avec observateur par mode de glissement. Nous
remarquons que l'intégration de l'observateur n'a pas d'influence sur
les performances du réglage. D'autre part, le flux Ö r
est orienté dans la direction
`d' ( Ö dr= Ö r ; Ö qr
=0).
V-4-4. Estimateur de la vitesse rotorique
Les équations d'état de la machine asynchrone
exprimée dans un espace vectoriel sont
[34]:
r r
is
. Ö r
r =
+ a22
a21
.
j
. ù r
;
;
-
1
T r
M
Tr
a21
. ù r
a j
=
22
1
R .M
r
Lr
;
2
;
+
T r
D R
= s
B1
ó
L 2
r
L.
s
Rr
r
.v s
r
d Ö
dt
D
L . ó
S
;
L.
S
(
ó
M
M
L r
di s =
.
r r
+
is
+ a12
. Ö r
a11
B 1
dt
Lr
.Tr
Où :
a11
1
a12
);
Chapitre V Commande non linéaire avec
observateur du flux par mode glissant et estimateur de vitesse
rotorique
r
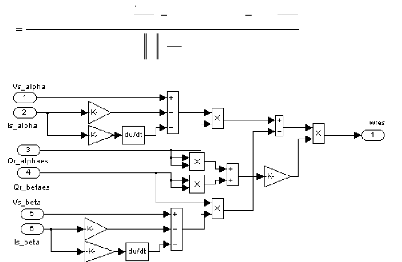
Fig V-6. Schéma bloc de la vitesse rotorique
estimée
Ce système d'équation peut être
réarrangé comme suit :

(V-53)
r
r
r s
v (R R ) . i L . .
s s r
= + + ó
L .T L
r r r
2 r
d i
L 2
r
dt
s s r
MM r r
M
Ö + ù Ö
.j .
r
di
à
à
s â
)
L . ó
s
L . ó
s
Ö r â
Ö - -
r s s
(v D.i
á â â
dt
r
2
à
Ö
di
sá
dt
s s
- D.i
á á
(v
à
ùr
M
Lr
(V-54)
Considérant que les vecteurs tension, courant et flux
rotorique peuvent êtres exprimés sous forme complexe, à
partir de l'équation (V-53), on déduit la vitesse rotorique
estimée :
La figure V-6 montre le diagramme de l'algorithme de la vitesse
rotorique. Cette dernière est déterminée à partir
des tensions, des courants et du flux rotorique dans le repère
á-â.
| 

