V-4-5. Schéma de simulation
Nous simulons le comportement de l'observateur du flux rotorique
et de la vitesse en utilisant le schéma de la figure V-7
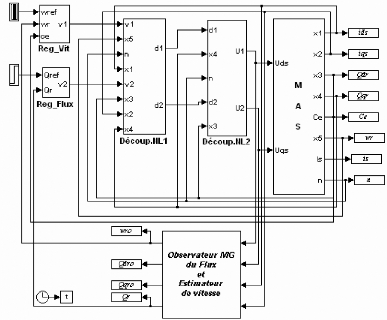
Fig V-7. Schéma de simulation de la commande
non linéaire de la machine asynchrone avec
observateur par mode de
glissement de flux et estimateur de vitesse rotoriques
La figure V-7 montre le schéma de principe de
régulation avec observateur par mode de glissement. Afin
d'apprécier les performances de la commande et de l'observateur par mode
de glissement, nous présentons les simulations du comportement de
l'association système observateur dont les paramètres sont
regroupés dans le tableau V-1.
V-4-6. Résultats de simulation
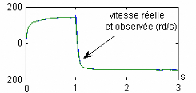
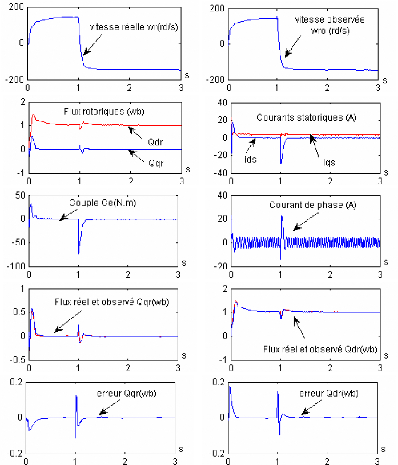
Fig V-8. Réglage de la MAS sans capteur
mécanique
La figure V-8 montre que le système est
découplé et que les réponses sont sans erreurs statique et
sans dépassement.
Nous remarquons aussi que l'intégration de l'observateur
n'a pas d'influence sur les performances du réglage.
V-5. Conclusion
Dans ce chapitre, nous avons présenté la commande
non linéaire avec observateur par mode de glissement du flux et de
l'estimateur de vitesse rotorique.
Nous nous sommes intéressés de plus près
à l'incorporation de deux types d'observateur à la boucle de
régulation. A savoir un observateur à terme correctif classique
et un observateur par mode de glissement. Chaque observateur et associé
à la commande non linéaire de la machine basé sur le
modèle non linéaire simplifié avec limitation direct du
courant
L'observateur par mode de glissement a montré des
performances moins intéressantes par rapport à celles de
l'observateur classique.
Pour améliorer cette structure de commande et augmenter sa
robustesse on fera appel à la commande par logique floue et c'est
l'objet du chapitre suivant.
| 
