2.2.2. Le modèle asymétrique
Le modèle asymétrique d'Alexander (1990)
considère le corps humain comme étant trois segments rigides,
i.e. un tronc et deux segments égaux représentant les membres
inférieurs (cuisse + jambe). Le centre de masse se trouve au niveau du
bas du tronc et représente le centre de masse de tout le modèle.
Le système est analysé en deux dimensions (2D) avec le pied comme
origine (voir figure n°3) [1].
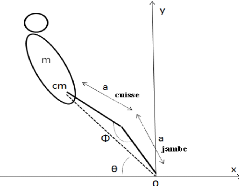
Figure n°3: modèle
asymétrique. [Alexander (1990)]
(« a » : longueur des membres
inférieurs, « è »: angle d'incidence
au sol, « Ö » : angle du genou)
2.3. Les méthodes de calcul de kleg
L'acquisition et les calculs des différentes
données cinétiques et cinématiques dépendent de la
disponibilité des outils techniques technologiques et de la nature de
l'expérimentation (voir tableau n°1).
Tableau n°1 : méthodes de calcul de
kleg au cours du sprint
|
Méthode
|
Auteur
|
Formules
|
Avantages et inconvénients
|
|
Farley et al.
(1999)
|
kleg= Ó kjoint
kjoint = ÄMjoint
Äèjoint
|
- Nécessite un système de capture du mouvement
(caméras), et des plates formes de force.
- calculs des forces et moments de
force par la dynamique
inverse.
|
|
Morin et al.
(2005)
|
-1
kleg = F · ÄL
max
|
- Utilisable dans des conditions de terrain
- Calcul rapide de la raideur mécanique
- Nécessite un radar pour
enregistrer les vitesses instantanées et des semelles
équipées de
capteurs de pression (switches) pour enregistrer les temps
d'envol et de contact
|
|
Ä = L - L 2 - ( vt 2)
2 + Ä y
L c c
F ( t ) = F max × sin[( Ð
t c ) · t ]
- 1
k vert = F · Ä y c
max
F max =mg·(Ð
2)·[(t f t c )+1)]
2 2
t t
F max c c
Ä = - · + ·
|
|
y c2 g
m Ð 8
|
Abréviations : « m »: la
masse corporelle (m), « g » :
accélération de la pesanteur (m.s-2), « F
»: force (N), « k »: la raideur
(kN.m-1), « Ayc » : le
déplacement vertical du centre de masse, « AL
» : l'abaissement de la jambe ressort (m), « L
»: la longueur de la jambe (m), « M »:
le moment de force (N.m-1), « è »
: angle articulaire (° : degré), « tf
»: temps d'envol (s), « tc
»: temps de contact (s).
2.3.1. La méthode analytique
La méthode analytique suppose que la raideur totale des
membres inférieurs est égale à la somme des raideurs
articulaires des articulations (kjoint) impliquées dans le
mouvement, i.e. la hanche, le genou et la cheville (voir
figure n° 4). La raideur articulaire est égale au produit de la
variation du moment de force par la variation de l'angle articulaire (voir
tableau n°1).
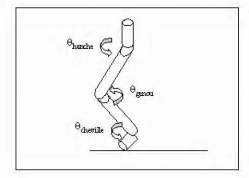
Figure n° 4 : Modèle masse
ressort. [Farley et al. (1999)]
La raideur de la jambe est la somme des raideurs de chaque
articulation, « è »
représente l'articulation des
trois angles de la jambe.
| 

