IV.5. Le modèle dynamique
direct (MDD)
On peut simplifier l'écriture du modèle
dynamique inverse comme par la relation :
 (IV-34) (IV-34)
avec :
 (IV-35)
(IV-35)
On utilise le modèle dynamique direct pour simuler le
comportement du robot dans la boucle de commande, il est donné
par :
 (IV-36) (IV-36)
 : L'inverse de la matrice
d'inertie. : L'inverse de la matrice
d'inertie.
Le calcul de la matrice M et le vecteur
H par la méthode de Lagrange se fait explicitement
(§ IV.3.2), et on peut aussi les tirer à partir du formalisme de
Newton Euler comme suit :
H est obtenu en considérant les
accélérations nulles dans l'équation (IV-34).
( si si ).
(IV-37) ).
(IV-37)
La matrice M est obtenue en remarquant
que sa iéme colonne est égal
à  si: si:  (IV-38)
(IV-38)
 étant le vecteur (nx1) dont tous les
éléments sont nuls sauf la
iéme composante qui égale
à 1. étant le vecteur (nx1) dont tous les
éléments sont nuls sauf la
iéme composante qui égale
à 1.
IV.6.
Application numérique
On a supposé que l'effort extérieur , est exprimé dans le repère
R6, pour cela le couple , est exprimé dans le repère
R6, pour cela le couple est égal à : est égal à :
 (IV-39)
(IV-39)
Les frottements sont négligeables sur toutes les
articulations.
En plus des paramètres géométriques du
Tableau (I.1), les paramètres entrant dans le calcul du
modèle dynamique sont donnés par le tableau suivant :
|
i
|
li
(m)
|
mi
(kg)
|
Gi
|
Ixi
Kg.m2
|
Iyi
Kg.m2
|
Izi
Kg.m2
|
|
1
|
1.00
|
25
|
[0,0,- l1/2]
|
0.01
|
0.05
|
0.06
|
|
2
|
0.75
|
30
|
[0,- l2/2,0]
|
0.10
|
0.20
|
0.30
|
|
3
|
0.50
|
15
|
[0, 0, l3/2]
|
0.40
|
0.40
|
0.20
|
|
4
|
0.25
|
4
|
[0, 0,- l4/2]
|
0.30
|
0.50
|
0.01
|
|
5
|
0.10
|
4
|
[0,- l5/2,0]
|
0.01
|
0.60
|
0.03
|
|
6
|
0.10
|
2
|
[0,0, l5+l6/2]
|
0.20
|
0.20
|
0.60
|
Tableau IV.1. Paramètres entrant dans
le calcul du modèle dynamique
avec :
li est la longueur du corps
Ci le long des axes Z1,Y2,Z3,Z4,Y5,Z6
respectivement.
g =9.81 m/s2
fe =[20,20,20,12,30,25]t
Nous avons considéré une trajectoire de
référence complètement spécifiée assurant
une continuité en position, vitesse et accélération,
figure (III.2)
Nous avons fait un test de comparaison entre les couples
calculés par les deux formalismes pour la trajectoire
désirée.
Les figures (IV.2), (IV.3)
montrent clairement que les résultats obtenus, par l'application des
deux formalismes, sont égaux avec une erreur de l'ordre de10-14
N.m pour les couples, et de 10-13 N pour la force
f3
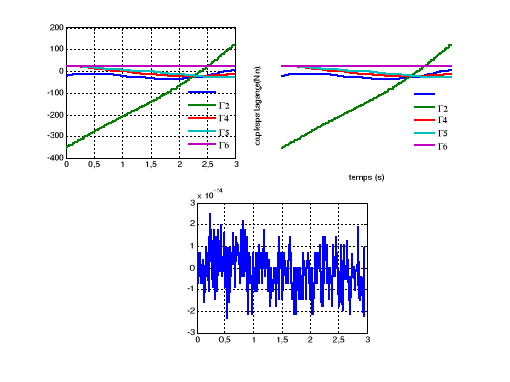
Figure IV.2. Les couples calculés, par
les deux formalismes
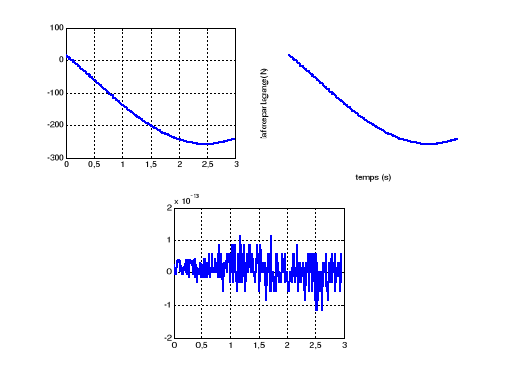 Figure IV.3. La force F3, par les deux
méthodes Figure IV.3. La force F3, par les deux
méthodes
| 

