2.5.8. Reproductibilité
(répétabilité)
C'est la capacité du capteur pour produire la même
sortie lorsque la même entrée est appliquée. [17]
2.5.9. Temps de réponse - Le temps de
récupération
Le temps de réponse: est le temps qu'il faut pour que
le capteur atteindre 90% de sa valeur à l'état d'équilibre
après l'introduction de la mesurande. [16]
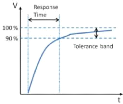
Figure 2.8 temps de réponse d'un capteur
Le temps de récupération: est le temps qu'il
faut au capteur d'être à moins de 10% de la valeur qu'elle avait
avant l'enlèvement de la mesurande. [16]
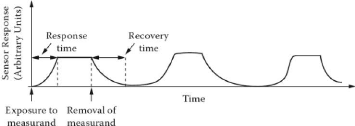
Figure 2.9 temps de récupération
2.6. Erreurs et incertitudes dans les capteurs
2.6.1. Les erreurs de mesure dans les capteurs
Les erreurs de mesure ont des causes systématiques que
l'opérateur peut corriger ou non. Ces erreurs ont des causes clairement
identifiées et prévisibles.
L'erreur sur le zéro (zéro offset) :
appelée aussi `dérive' est généralement due au
vieillissement des composantes d'un capteur et aux variations de
température. Elle se traduit par un décalage de la grandeur de
sortie indépendante du mesurande.
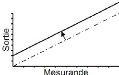
Figure 2.10 L'erreur du zéro
27
L'erreur liée à l'étalonnage : L'erreur
liée à l'étalonnage du capteur est due à la
qualité de l'opération d'étalonnage. Si cette
opération n'est pas effectuée correctement, cela se traduit par
une erreur dans la pente de la caractéristique du capteur. Il est
recommandé de toujours étalonner un capteur avec un étalon
de référence au moins 4 fois plus précis.
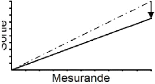
Figure 2.11 L'erreur liée à
l'étalonnage
Les erreurs dues aux grandeurs d'influence : Les grandeurs
d'influence provoquent sur le capteur des variations de ses
caractéristiques métrologique. L'erreur sur le zéro
mentionnée précédemment est un très bon exemple de
ces variations.
L'erreur sur la sensibilité est aussi une erreur due
aux grandeurs d'influence. Toutes les grandeurs physiques connues peuvent agir
comme grandeur d'influence. Pour minimiser l'effet de ces grandeurs
d'influence, il faut utiliser soit la compensation, soit la stabilisation.
Les erreurs dues aux conditions d'alimentation et de
traitement de signal : La grandeur de sortie peut être fortement
dépendante des conditions d'alimentation du capteur. L'alimentation du
capteur est dans certains cas une grandeur modifiante qui peut affecter la
précision d'une mesure.
Les erreurs dues au mode d'utilisation : certaines erreurs
sont simplement dues à une utilisation incorrecte d'un capteur. Par
exemple, on si utilise un capteur pas assez rapide dans un cas ou le mesurande
évolue de façon rapide.
| 

