I.7 Conclusion
Ce chapitre a traité les différents
phénomènes perturbateurs qui influents sur la qualité de
la tension, ainsi on a présenté une étude
détaillée concernant les profils de la tension, courant et
l'écoulement de la puissance active et réactive sur les lignes de
transport d'énergie électrique en régime permanent.
Les lignes longues ont un impact significatif sur la
régulation de la tension et la stabilité du réseau. En
outre, il est démontré qu'il est nécessaire de compenser
ces lignes pour respecter les deux contraintes fondamentales du transport
d'énergie électrique.
Dans ce chapitre, les critères justifiant la
compensation des lignes sont essentiellement des critères de
régime permanent : maintien de la tension en régime permanent
à une valeur acceptable et augmentation de la puissance transportable de
façon stable. Cependant, l'utilisation simultanée de la
compensation série et de la compensation shunt inductive est très
importante pour avoir une qualité d'énergie transportée le
long de la ligne.
La compensation conventionnelle (séries et shunts) et
la compensation moderne utilisant les dispositifs FACTS (basées sur
l'électronique de puissance) seront traitées en détaille
dans le prochain chapitre.


II.1 Introduction
L'amélioration de la qualité de
l'énergie, l'augmentation de la capacité transitée et le
contrôle des réseaux existants peut être obtenus grâce
à la mise en place de nouvelles technologies. [22]
Pour les différentes raisons évoquées
dans l'introduction générale, les dispositifs FACTS ont un
rôle important à jouer dans le contrôle des transits de
puissance et dans le maintien de conditions d'exploitation sûres du
réseau de transport. Ce chapitre a pour but de mettre en évidence
les caractéristiques et le potentiel des différents FACTS
développés à ce jour.
Il commence par un bref rappel sur l'exploitation d'un
réseau électrique et les différentes techniques de
compensation (shunt et série). Le concept FACTS est ensuit
présenté de manière générale et une
classification des dispositifs est proposée. La fin du chapitre est
consacrée à la discussion d'utilisations des FACTS ainsi leurs
placements dans les réseaux électriques.
II.2 Exploitation d'un réseau
électrique
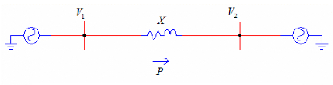
Figure II.1: Puissance transité entre deux
réseaux
La puissance active P transitée entre deux
réseaux de tensions V1 et V2 présentant un angle de transport
ä (déphasage entre V1 et V2) et connectés par une liaison
d'impédance X est donnée par l'équation suivante :
P 1 2
V . V
= (II.1)
sinä
X
Cette équation montre qu'il est possible d'augmenter
la puissance active transitée entre deux réseaux soit en
maintenant la tension des systèmes, soit en augmentant l'angle de
transport entre les deux systèmes, soit en réduisant
artificiellement l'impédance de la liaison.
En jouant sur un ou plusieurs de ces paramètres, les
FACTS permettent un contrôle précis des transits de puissance
réactive, une optimisation des transits de puissance active sur les
installations existantes et une améliorations de la stabilité
dynamique du réseau. Ils permettent aussi aux consommateurs industriels
de réduire les déséquilibres de charges et de
contrôler les fluctuations de tensions crées par des variations
rapides de la demande de puissance réactive et ainsi d'augmenter les
productions, de réduire les coûts et d'allonger la durée de
vie des équipements.
II.3 Compensation Traditionnelle II.3.1 Compensation
shunt
La compensation parallèle (shunt) consiste à
enclencher des condensateurs shunt et/ou des inductances shunt connectés
entre les phases du réseau et la terre en général par le
biais de disjoncteurs à différents endroits sur le réseau
pour modifier l'impédance des lignes, dans le but de maintenir des
niveaux de tension acceptables suivant l'état de charge du réseau
[22] [24].
Ces éléments permettent de compenser les
réseaux en puissance réactive et de maintenir la tension dans les
limites contractuelles.
Cette technique de compensation est dite passive car elle
fonctionne en tout ou rien. C'est-à-dire qu'elle est soit en service,
par exemple lorsqu'une inductance shunt est enclenchée, soit
complètement hors service lorsque l'inductance est retirée.
Lorsqu'elle est en service, aucune modification des inductances ou des
condensateurs n'est effectuée pour essayer de contrôler la tension
ou l'écoulement de puissance.
D'après la figure (II.2), on voit que ces
équipements permettent aussi d'augmenter la puissance active
transitée. La puissance transitée peut être
augmentée de 50% pour une compensation au niveau de la charge et de 100%
pour une compensation au point milieu.
Une ligne HT peut être modélisée par un
schéma en ð représenté par la figure (II.2).
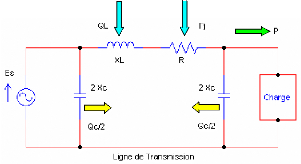
Figure II.2 : Représentation du Système
Lorsque le réseau n'est pas ou peu chargé,
c'est-à-dire que l'impédance de la charge est très
élevée, la tension sur la ligne a tendance à monter
considérablement (effet Ferranti) [10] [13], cette augmentation de
tension est d'autant plus importante que le réseau est exploité
à tension élevée et que les lignes sont longues. Pour
réduire la tension en bout de ligne, il faut augmenter artificiellement
l'impédance caractéristique de la ligne en diminuant sa
capacité shunt. Des inductances shunt sont enclenchées à
différents postes sur le réseau [21]. Cependant, lorsque le
réseau est fortement chargé, dans ce cas l'impédance de la
charge est très faible et la tension a tendance à diminuer sur le
réseau. Pour compenser cet effet, il s'agit de diminuer artificiellement
l'impédance caractéristique de la ligne pour la rendre
égale, ou la plus près possible, de l'impédance de la
charge. Les réactances shunt deviennent inutiles. Pour maintenir la
tension dans les limites contractuelles, le gestionnaire du réseau doit
donc augmenter la capacité shunt de la Ligne et connecter des
condensateurs shunt dans différents postes du réseau selon la
charge.
Les bancs de condensateurs vont compenser la puissance
réactive absorbée par la charge et ainsi éviter la
transmission de puissance réactive sur de longues distances. De
même que les réactances, ces bancs de condensateurs doivent
être connectés\déconnectés par des disjoncteurs.
Dans le cas théorique ou la compensation est
répartie sur toute la longueur de la ligne, le degré de
compensation shunt d'une ligne est défini comme étant le rapport
de la valeur absolue de la susceptance du compensateur par unité de
longueur (Bsh) sur la susceptance de capacité de ligne par
unité de longueur (BC):
K= (II 2)
sh B
(a)
(b)
P
Figure II.3: Principe de compensation shunt dans un réseau
AC radial (a) sans compensation, (b) avec compensation [22]
L'impédance caractéristique virtuelle de la ligne
s'écrit :
Z
'
(II.3)
sh
Z
0

0 1K
=
-
Sa puissance naturelle virtuelle est :
P 0 = P· 1-K (II.4)
'
0sh
On constate aussi que la longueur électrique de la ligne
est également modifiée avec compensation shunt:

è ' = è· 1-K (II.5)
sh
La compensation réactive shunt est un bon moyen pour
contrôler l'impédance caractéristique, dans le but de
maintenir un niveau de tension acceptable sur les lignes de transport
d'électricité. Par contre, elle ne constitue pas un bon moyen
pour augmenter la
puissance maximale transportable. Pour augmenter cette
puissance, il faut diminuer è; pour diminuer è, il est
nécessaire d'augmenter Ksh en ajoutant des inductances
shunt.
En pratique, la compensation shunt passive est
utilisée principalement pour maintenir la tension à toutes les
barres du réseau à un niveau proche de la tension nominale, et ce
pour les différents niveaux de charge du réseau. Il est clair que
les équipements de compensation ne sont pas distribués de
façon uniforme le long de la ligne comme le sont les inductances et les
condensateurs du circuit équivalent d'une ligne. La compensation est
localisée dans des postes qui sont répartis à des endroits
stratégiques sur la ligne. Puisque la compensation n'est pas
répartie d'une façon uniforme, il est impossible de maintenir la
tension à sa valeur nominale en tout point de la ligne. II est donc
important de bien sélectionner les endroits où la compensation
shunt est installée pour éviter que la tension s'écarte
trop de sa valeur nominale.
II.3.2 Compensation série
L'équation (II.1) montre que la puissance active
échangée entre deux systèmes peut être
augmentée si l'on réduit l'impédance de la liaison. C'est
ce que réalise la compensation série par l'adjonction d'un banc
de condensateurs d'impédance XC en série avec la ligne.
Les condensateurs ajoutés ont une capacité fixe
qui ne varie pas dans le temps. Cette compensation permet d'une part de
diminuer Zo et d'autre part de diminuer la longueur électrique è
de la ligne.
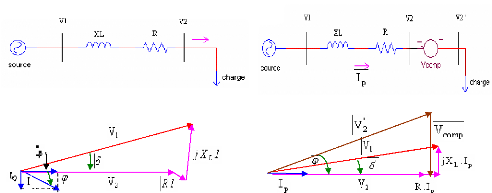
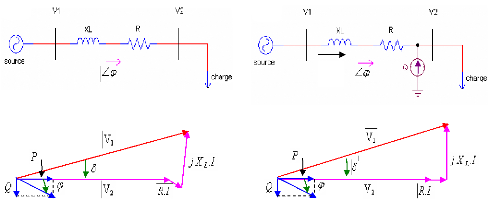
(a) (b)
Figure II.4: Principe de compensation série dans un
réseau AC radial
(a) sans compensation, (b) avec compensation
Artificiellement l'impédance de la ligne est donc
réduite de XL à (XL - XC) et le transit de puissance est
augmenté. De plus, comme le montre le diagramme de Fresnel
illustré sur la figure (II.4), le profil de la tension est
amélioré tout au long de la ligne (V1 - V'2) plus petit, et
l'angle de transport ä est réduit [22][25].
En pratique, la compensation série est
localisée dans des postes situés à des endroits
stratégiques sur les lignes. Pour mieux comprendre son influence il est
utile de considérer qu'elle est répartie uniformément sur
toute la longueur de la ligne. Dans ce cas, le degré de compensation
série se définit comme étant la valeur absolue du rapport
de la susceptance inductive série de la ligne par unité de
longueur sur la susceptance par unité de longueur de la capacité
série qui est ajoutée.
B
K= (II.6)
se
L
se B
En réduisant l'impédance inductive série de
la ligne, l'impédance caractéristique virtuelle devient :

Z0 = Z· 1 - K (II.7)
0se
Sa puissance naturelle virtuelle est:
P
'
(II.8)
se
P0

0 1K
=
-
Plus le degré de compensation est élevé
plus l'impédance virtuelle est faible, ce qui contribue à
augmenter la puissance maximale transportable par la ligne. D'autre part, la
longueur électrique virtuelle de la ligne s'écrit :

è ' = è· 1 - K (II.9)
se
Pour transporter la puissance de façon stable il est
nécessaire que l'angle de transmission ä soit inférieur
à 90' et idéalement assez faible pour prévoir les cas d'un
appel de puissance à la suite d'une perturbation sur le réseau
[13] [21].
Si Ie profil de la tension sur la ligne compensée est
pratiquement plat, ce qui est le cas lorsque la ligne est bien
compensée, la puissance absorbée par la charge est pratiquement
égal à la puissance virtuelle de la ligne. De (I.23) et (I.35) on
déduit que :
P=P (II.10)
00 '
'
sinè sin ä
Comme '
P=P0 alors '
ä è.
Puisque l'augmentation de la compensation série
diminue è', l'angle de transmission ä diminue également avec
la compensation série.
La compensation série augmente la puissance maximale
transportable, en diminue angle de transmission de la ligne. Ces deux effets
font en sorte qu'elle est un moyen très efficace d'augmenter la limite
de stabilité en régime permanent du réseau et par
conséquent la stabilité dynamique et transitoire.
Cependant du fait du nombre limité d'opérations
et des délais d'ouverture/fermeture des disjoncteurs, ces
réactances et condensateurs connectés en parallèles ou en
séries ne doivent pas être commutés trop souvent et ne
peuvent pas être utilisés pour une compensation dynamique des
réseaux. Dans le cas ou le contrôle du réseau
nécessite des commutations nombreuses et/ou rapides, on fera appel
à des équipements contrôlés par convertisseurs
à base de l'électronique de puissance appelés sous nom
FACTS (Flexible AC Transmission
Systems), c'est ce qui fait l'objet du prochain
paragraphe.
Les deux principales raisons qui justifient l'installation
des dispositifs FACTS dans les réseaux électriques sont:
· Augmentation des limites de stabilité
dynamique.
· Meilleur maîtrise des flux d'énergie.
II.4 Dispositifs FACTS
Selon l'IEEE (Institute of Electrical and Electronics
Engineers), la definition du terme FACTS est la suivante: Systèmes
de Transmission en Courant Alternatif comprenant des dispositifs basés
sur l'électronique de puissance et d'autres dispositifs statique
utilisés pour accroître la contrôlabilité et
augmenter la capacité de transfert de puissance du réseau.
Avec leurs aptitudes à modifier les
caractéristiques apparentes des lignes, les FACTS sont capables
d'accroître la capacité du réseau dans son ensemble en
contrôlant les transits de puissances. Les dispositifs FACTS ne
remplacent pas la construction de nouvelles lignes. Ils sont un moyen de
différer les investissements en permettant une utilisation plus efficace
du réseau existant [26] [34].
II.5 Classification des dispositifs FACTS
Depuis les premiers compensateurs, trois
générations de dispositifs FACTS ont vu le jour. Elles se
distinguent par la technologie des semi-conducteurs et des
éléments de puissance utilisés [34] [35].
1- La première génération est
basée sur les thyristors classiques. Ceux-ci sont
généralement utilisés pour enclencher ou déclencher
les composants afin de fournir ou absorber de la puissance réactive dans
les transformateurs de réglage.
2- La deuxième génération, dite
avancée, est née avec l'avènement des semiconducteurs de
puissance commandables à la fermeture et à l'ouverture, comme le
thyristor GTO. Ces éléments sont assemblés pour former les
convertisseurs de tension ou de courant afin d'injecter des tensions
contrôlables dans le réseau.
3- Une troisième génération de FACTS
utilisant des composants hybrides et qui est adaptée à chaque
cas. Contrairement aux deux premières générations,
celle-ci n'utilise pas de dispositifs auxiliaires encombrants tels que des
transformateurs pour le couplage avec le réseau.
Dans notre proposition, une autre classification des
contrôleurs FATCS basée sur les cinq caractéristiques
indépendantes [32] [33]:
1. Selon le type de Raccordement sur le réseau
(Connexion) ;
2. Selon le mode de Commutation ;
3. Selon la Fréquences de Commutation ;
4. Selon le mode de Stockage d'énergie ;
5. Selon le mode de Connexion au Port DC.
Selon ces critères, trois familles de dispositifs FACTS
peuvent être mises en évidence [27] [33]:
· les dispositifs shunt connectés en
parallèle dans les postes du réseau.
· Les dispositifs série insérés en
série avec les lignes de transport.
· Les dispositifs combinés
série-parallèle qui recourent simultanément aux deux
couplages
II.5.1 Dispositifs FACTS Shunt II.5.1.1 Compensation
shunt
L'objectif principal de la compensation shunt est
l'accroissement de la puissance transmissible dans le réseau. Le
principe consiste à fournir ou à absorber de la puissance
réactive de façon à modifier les caractéristiques
naturelles des lignes pour le rendre plus compatibles avec la charge [21]
[23].
En régime permanent, la compensation réactive
est utilisée pour la sectionnalisation des lignes ainsi que le maintien
de la tension aux noeuds.
En régime transitoire, les dispositifs shunt permettent
un contrôle dynamique de la tension pour l'amélioration de la
stabilité transitoire et l'amortissement des oscillations de puissance
et réduction des oscillations de tension (flicker) [34].
II.5.1.2 Compensateur statique de puissance
réactive SVC
Compensateur Statique de Puissance Réactive (CSPR)
(acronyme anglais de Static Var
Compensator SVC) est un équipement de compensation
parallèle a base d'électronique de puissance (Thyristor) capable
de réagir en quelques cycles aux modifications du réseau (Figure
II.5). IL permet entre autres la connexion de charges éloignées
des centres de production et la diminution des effets des défauts ou des
fluctuations de charges [22].
Un SVC est généralement constitué d'un ou
plusieurs bancs de condensateurs fixes (FC) commutables soit
par disjoncteur, ou bien par thyristors (Thyristor Switched Capacitor
TSC) et d'un bancs de réactances contrôlable
(Thyristor controlled Reactor TCR) et par des
réactances commutables (Thyristor Switched Reactor TSR),
et d'autre part on trouve des filtres d'harmoniques.
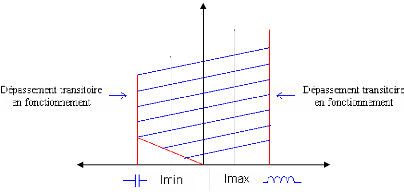
Si le SVC fonctionne en réglage de tension, le
système de contrôle ajust le courant dans le SVC de façon
à ce que courant et tension suivent la courbe caractéristique
représentée par (Figure II.6).
Chapitre II : Généralités sur les
FACTS
Vm
Vref
Figure II.5: Structure de base d'un SVC [28]
La courbe caractéristique est une droite dont la pente et
la tension de référence peuvent être ajustées par le
système de contrôle [28] [34].
Capacitive
Inductive
V
B max
Bmin
I
Figure I.6: Courbe caractéristique tension-courant du
SVC.
Le système de contrôle permet un ajustement du
courant du SVC en 2-3 cycles et donc de répondre rapidement à des
variations de charge.
Le SVC a un seul port avec une connexion parallèle au
système de puissance. Les thyristors sont à commutation
naturelle, ils commutent à la fréquence du réseau, comme
montré à la (Figure II.5). Il existe deux types de SVC: SVCs
industriels et les SVCs de transmission [22].
Les SVC industriels sont souvent associés à des
charges déséquilibrées qui peuvent varier très
rapidement telles que les laminoirs ou les fours à arcs pour lesquels
les fluctuations rapides de puissance réactive limitent les capacitives
de production et provoqent du flicker (scintillement des lampes).
Les SVCs de transmission ont pour fonction de réduire
la tension des réseaux moins chargés en absorbant de la puissance
réactive, d'augmenter la tension des réseaux fortement
chargés en fournissant de la puissance réactive et d'aider le
système à retrouver sa stabilité après un
défaut.
Cette dernière fonction est particulièrement
importante, et sur ce type de FACTS que notre étude sera
développée dans le troisième chapitre.
II.5.1.3 Résistance de freinage
contrôlée par thyristors TCBR
La résistance de freinage contrôlée par
thyristors TCBR (Thyristor-Controlled Braking Resistor) est
formée d'une résistance fixe branchée en série avec
une valve à thyristors bidirectionnelle [29]. La valeur effective de la
résistance est contrôlée avec l'angle d'allumage des
thyristors. Il existe également des dispositifs sans commande de phase,
dans lesquels les thyristors sont simplement commutés. La TCBR est
utilisé pour aider à la stabilisation du réseau ou pour
diminuer l'accélération des générateurs en cas de
perturbation. Les dispositifs avec contrôle de l'angle d'amorçage
peuvent être utilisés pour amortir de façon
sélective les oscillations basses-fréquences.
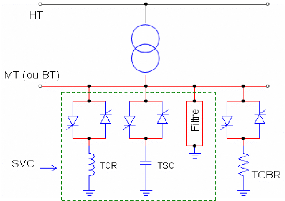
Figure II.7 : Schéma du SVC avec TCBR.
II.5.1.4 Compensateur statique synchrone
STATCOM
Le compensateur statique synchrone STATCOM (Static
Synchronous Compensator), autrefois appelé compensateur statique de
puissance réactive avancé, est également
désigné par les acronymes SSC et STATCON (Static Condenser).
Le STATCOM est basé sur la structure d'un convertisseur de tension
triphasé (figure II.8). Il correspond à l'équivalent
statique exact de la machine synchrone classique fonctionnant en compensateur,
mais sans inertie. Il est principalement utilisé pour la compensation
dynamique des réseaux, afin de faciliter la tenue en tension,
d'accroître la stabilité en régime transitoire et d'amortir
les oscillations de puissance [22] [30].
Le convertisseur ne fournit ou n'absorbe que de la puissance
réactive. Ceci est réalisé en contrôlant les
tensions de sortie de manière à ce que ces dernières
soient en phase avec les tensions du réseau. De ce fait, la puissance
active fournie par la source de tension continue (le condensateur
chargé) doit être nulle. De plus, la puissance réactive
étant par définition nulle en régime continu
(fréquence égale à zéro), le condensateur ne joue
pas de rôle dans la génération de puissance
réactive. En d'autres mots, le convertisseur fait tout simplement
l'interconnexion entre les trois phases, de manière à ce que les
courants de sortie réactifs puissent circuler librement entre ces
dernières. En pratique, les semiconducteurs utilisés dans les
convertisseurs ne sont pas sans pertes. De ce fait, de l'énergie
stockée dans le condensateur sera consommée par les pertes
internes des thyristors. La puissance réactive nécessaire pour
couvrir ces pertes peut être fournie par le réseau en sorte que
les tensions à la sortie du convertisseur soient
légèrement déphasées par rapport aux tensions du
réseau. Dans ce cas, le convertisseur absorbe une faible quantité
de puissance active.
Le STATCOM est un circuit avec un seul port monté en
parallèle avec le réseau, il utilise la commutation
forcée, la fréquence de commutation des interrupteurs est
élevée, son élément de stockage d'énergie
est un condensateur et ceci implique un port DC (Figure II.8).
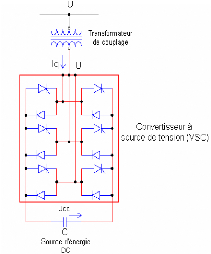
Figure II.8: Structure de base d'un STATCOM.
L'échange de puissance réactive avec le
réseau se fait en faisant varier l'amplitude des tensions de sortie.
Selon l'amplitude de ces tensions, les trois régimes de fonctionnement
suivants sont possibles pour le STATCOM
1. U' < U : le courant circule du convertisseur vers le
réseau; le STATCOM produit alors de la puissance réactive
(comportement capacitif).
2. U' > U : le courant circule du réseau vers le
convertisseur; le STATCOM consomme de la puissance réactive et alors un
comportement inductif.
3. U' = U : aucun courant ne circule entre le réseau et le
convertisseur (aucun échange d'énergie réactive).
La variation de l'amplitude des tensions de sortie est obtenue
en faisant varier la tension continue aux bornes du condensateur. Le STATCOM
peut fournir un courant capacitif ou inductif indépendant de la tension
du réseau. Il peut donc fournir le courant capacitif maximal même
pour de faibles valeurs de tensions. Sa capacité à soutenir la
tension du réseau est donc meilleure que celle du SVC. De plus, le
STATCOM peut augmenter temporairement les valeurs nominales du courant
(inductif ou capacitif).
Par rapport au compensateur statique de puissance réactive
conventionnel de type SVC, le STATCOM présente les avantages
suivants:
· l'espace nécessaire pour l'installation est
réduit en raison de l'absence de bobines d'inductance et de
condensateur;
· le recours à des filtres d'harmoniques n'est pas
nécessaire;
· les performances en régime dynamique sont
meilleures.
L'avantage de ce dispositif est de pouvoir échanger de
l'énergie de nature inductive ou capacitive uniquement à l'aide
d'une inductance. Contrairement au SVC, il n'y a pas d'élément
capacitif qui puisse provoquer des résonances avec des
éléments inductifs du réseau. La caractéristique
statique de ce convertisseur est donnée par la figure (II.9).
V
I
Figure II.9: Caractéristique V-I du STATCOM.
II.5.1.5 Générateur synchrone statique
SSG
Un générateur synchrone statique SSG
(Static Synchronous Generator) est une combinaison d'un STATCOM et
d'une source d'énergie capable de fournir ou d'absorber de la puissance.
Cette source a pour rôle de maintenir la tension aux bornes du
condensateur à la valeur désirée. Le terme SSG inclut
toutes les sources d'énergie telles que les batteries, volants
d'inertie, aimants supraconducteurs, etc. toutefois, deux dispositifs
particuliers peuvent être mis en évidence [31] [35].
1. Le système de stockage par batterie BESS
(Battery Energy Storage System) utilise une source de nature chimique.
Généralement, les unités BESS sont relativement petites
mais permettent un échange de puissance élevé. Leur
capacité à ajuster rapidement la quantité d'énergie
à fournir ou à absorber est utilisée pour la
stabilité
transitoire. Lorsqu'il ne fournit pas de la puissance active
au système, le convertisseur est utilisé pour changer la batterie
de manière appropriée.
2. Le système de stockage d'énergie par aimant
supraconducteur SMES (Superconducting Magnetic Energy Storage) est un
dispositif permettant d'injecter ou d'absorber de la puissance active et
réactive. Le SMES sert principalement au contrôle dynamique des
transits de puissance dans le réseau électrique.
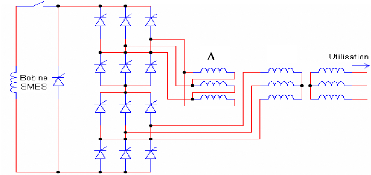
Y
Figure II.10 : SMES mises en application avec un convertisseur
à thyristor [31]
II.5.2 Dispositifs FACTS séries
Il existe deux familles de dispositifs FACTS qui sont
insérés dans le réseau: les compensateurs série et
les régulateurs statique de tension et de phase. Leurs
caractéristiques et principes respectifs sont décrits dans cette
section.
II.5.2.1 Compensateurs séries
La réactance des lignes est une des limitations
principales de la transmission de courant alternatif à travers les
longues lignes. Pour remédier à ce problème, la
compensation série capacitive a été introduite il y a
plusieurs dizaines d'années afin de réduire la partie
réactive de l'impédance de la ligne. Les dispositifs FACTS de
compensation série sont des évolutions des condensateurs
série fixes. Ils agissent généralement en insérant
une tension capacitive sur la ligne de transport qui permet de compenser la
chute de tension inductive. Ils modifient ainsi la réactance effective
de la ligne. La tension insérée est proportionnelle et
perpendiculaire au courant dans la ligne.
II.5.2.2 Compensateurs séries à
thyristors
Les premiers schémas de compensateurs série
à thyristors ont été proposés en 1986 [36].
À l'heure actuelle, trois conceptions principales de compensateurs
série à thyristors peuvent être distinguées:
· le condensateur série commandé par
thyristors;
· le condensateur série commuté par
thyristors;
· le condensateur série commandé par
thyristors GTO.
En pratique, les compensateurs série à thyristors
sont souvent des combinaisons de branches contrôlées et
'éléments de valeurs fixes.
II.5.2.2.1 Condensateur série commandé
par thyristors TCSC
Un condensateur série commandée par thyristors
TCSC (Thyristor Controlled Series Capacitor) est formé d'une
inductance commandée par thyristors en parallèle avec un
condensateur [22][25]. Ce montage permet un réglage continu sur une
large gamme de la réactance capacitive à la fréquence
fondamentale. Les montages peuvent varier selon les fabricants. La figure
(II.11) illustre le schéma du TCSC composé de plusieurs modules
identiques tous contrôlés de la même façon. En
pratique, une varistance à oxyde métallique ou MOV (Metal
Oxide Varistor) est insérée en parallèle afin de
protéger le condensateur contre les surtensions.
TCSC
Figure II.11: Schéma d'un TCSC composé de plusieurs
modules identiques
La valeur de l'impédance du TCSC est modifiée en
contrôlant le courant circulant dans l'inductance au moyen de la valve
à thyristors.
L'expression de l'impédance est donnée par
l'équation suivante où á représente l'angle de
retard à l'amorçage des thyristors [29] :
X
()á=
(II.11)
jLù
2 sin2á
()2
ð á
- + - LCù
ð 2
Trois régimes de fonctionnement peuvent être
distingués [35]:

Figure II.12: Régimes de fonctionnement du TCSC
a) Les thyristors sont bloqués; le courant de la ligne
passe uniquement par le condensateur. Le TCSC a alors une impédance fixe
correspondant à celle du condensateur.
b) Les thyristors sont en pleine conduction; l'impédance
du TCSC est fixe et correspond à l'impédance équivalente
résultant de la mise en parallèle de la capacité et de
l'inductance.
c) Les thyristors sont commandés en conduction partielle.
Un courant de boucle circule dans le TCSC et la réactance apparente de
ce dernier est supérieure à celle de la capacité (ou de
l'inductance) seule.
II.5.2.2.2 Condensateur série commuté par
thyristors TSSC
Le schéma de base d'un condensateur série
commutée par thyristors TSSC (Thyristor Switched Series Capacitor)
est constitué de plusieurs capacités montées en
série, chacune étant shuntée par une valve à
thyristors montée en dérivation.
Le degré de compensation est contrôlé par
paliers. Une capacité série est insérée dans le
circuit en bloquant les thyristors lui correspondant. L'extinction a lieu de
manière spontanée lors du passage par zéro du courant. Une
fois la valve bloquée, la capacité se charge sur une
demi-période puis se décharge le demi-cycle de la polarité
opposée. Pour minimiser les transitoires, les thyristors sont
enclenchés lorsque la tension aux bornes de la capacité est nulle
[29] [35].
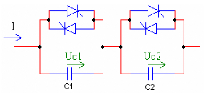
Figure II.13: Condensateur série commuté par
thyristors TSSC
II.5.2.2.3 Condensateur série commandé par
thyristors GTO GCSC
Un condensateur série commandé par thyristors
GTO GCSC (GTO ThyristorCotrolled Series Capacitors) est formé
d'un condensateur de capacité fixe monté en parallèle avec
une valve à thyristors GTO (figure II.14) . En pratique, une protection
contre les surtensions est réalisée au moyen d'un dispositif de
limitation de la tension tel qu'un MOV ou un disjoncteur monté en
dérivation. Le GCSC est à la compensation série ce qu'est
le TCR à la compensation shunt, les relations valables pour le courant
étant transformées en équations de tension.
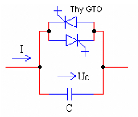
Figure II.14: schéma de base d'un GCSC
Pour un courant de ligne donné, la tension aux bornes
de la capacité est contrôlée. Elle est nulle lorsque les
thyristors sont passants et maximale lorsqu'ils sont bloqués. Le
contrôle de la tension est réalisé en contrôlant
l'angle d'extinction ã des thyristors GTO. Celui-ci est mesuré
depuis le passage par zéro du courant.
La réactance effective du GCSC est donnée par
l'eqn. Suivante :
2 1
XGCSCXC1
()
ãsin2
= - - ã
ã (II.12)
ð ð
Le contrôle de l'angle d'extinction des thyristors GTO
est source d'harmonique de tension. Celle-ci est d'autant plus importante que
ã est grand. L'élimination des harmoniques par des
méthodes conventionnelles n'est pratiquement pas applicable dans le
cas du GCSC. Elle nécessiterait l'insertion d'un
transformateur. Les amplitudes des harmoniques peuvent cependant être
réduites en utilisant plusieurs unités montées en
série et en les contrôlant de manière
séquencée.
II.5.2.3 Compensateurs statique séries
synchrone SSSC
Le compensateur statique série synchrone SSSC
(Static Synchronous Series Compensator) est un dispositifs FACTS de la
deuxième génération (figure II.15). Il est formé
d'un convertisseur de tension inséré en série dans la
ligne par l'intermédiaire d'un transformateur [25] [29]. Le SSSC agit
sur le courant de ligne en insérant une tension en quadrature avec ce
dernier, la tension pouvant être capacitive ou inductive. Un SSSC est
capable d'augmenter ou diminuer le flux de puissance dans une ligne, voir d'en
inverser le sens. Le comportement d'un SSSC peut être assimilé
à celui d'un condensateur ou d'une inductance série
réglable. La différence principale réside dans le fait que
la tension injectée n'est pas en relation avec le courant de ligne. De
ce fait, le SSSC présente l'avantage de pouvoir maintenir la valeur de
la tension insérée constante, indépendamment du courant.
Il est donc efficace tant pour des petites charges (faibles courants) que pour
des grandes charges.
Figure II.15: Schéma d'un Compensateurs statique
séries synchrone [34]
Un autre avantage du SSSC réside dans le fait que ce
type de compensateur n'insère pas de condensateur en série avec
la ligne de transport. De ce fait, il ne peut pas provoquer de résonance
hyposynchrone. De plus, sa taille est réduite en comparaison de celle
d'un TCSC [34].
Par contre, sa commande est plus complexe. Parmi les
inconvénients, il y a également le coût élevé
du SSSC par rapport à celui des condensateurs série
réglables. Il est en grande partie dû au transformateur HT.
Les applications pour lesquelles sont utilisées les SSSC
sont identiques à celles où l'on a recours à des
condensateurs séries réglables. Ce sont plus
particulièrement:
· les commandes statiques et dynamiques des flux de
puissances;
· l'amélioration de la stabilité
angulaire;
· l'atténuation des oscillations
électromécaniques.
II.5.3 Régulateurs statiques de tension et de
phase
Les dispositifs de réglage de tension et de phase
présente une différence fondamentale avec les autres FACTS. Ils
ne sont en effet pas capables de produire ou d'absorber de la puissance et ne
permettent que de modifier les transits de puissances active et
réactive. Tout comme les transformateurs déphaseurs et de
réglage classiques, ils agissent en insérant une tension UT en
série dans la ligne de manière à augmenter ou diminuer le
courant y circulant.
Le réglage en charge mécanique est toutefois
remplacé par un transformateur de prises de réglage à
thyristors classiques ou GTO (figure II.16).
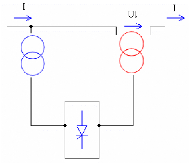
Figure II.15: Schéma de principe d'un régulateur
statique de tension et de phase
Il existe plusieurs types de régulateurs qui se
différencient par l'architecture du convertisseur et le couplage du
transformateur auxiliaire en parallèle. Parmi ces dispositifs, les deux
familles suivantes peuvent être distinguées:
1- les régulateurs de tension dont la tension
insérée est en phase avec la tension au noeud et qui sont
utilisés pour le contrôle de la puissance réactive.
2- les dispositifs déphaseurs dans lesquels la tension
injectée modifie l'angle de transport et qui agissent principalement sur
les transits de puissances active.
II.5.3.1 Régulateurs de tension
contrôlé par thyristor TCVR
Le régulateur de tension contrôlé par
thyristor TCVR (Thyristor Controlled Voltage Regulator) insère
une tension UT qui est en phase avec la tension nodale Ui, de sorte à
augmenter ou diminuer son amplitude. Le contrôle de Uieff
permet de modifier les transits de puissance réactive dans les
lignes. La figure (II.16) présente un des montages utilisé pour
la réalisation d'un TCVR. La tension en phase est prélevée
sur un transformateur auxiliaire qui dispose de trois enroulements secondaires
ayant des proportions 1:3:9.
Chaque bobinage possède un commutateur à thyristors
qui lui permet d'être inclus ou non en sens positif ou négatif.
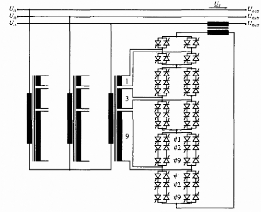
Figure II.16: Schéma d'un régulateur de tension
contrôlé par thyristors
II.5.3.2 Régulateur de phase
Plusieurs variantes de déphaseurs ont été
développées. Elles permettent d'obtenir des tensions
injectées de phases différentes [37]. Le principe du
régulateur de phase consiste à modifier l'angle de transport
ä de la ligne dans laquelle il est placé en contrôlant la
phase du noeud i auquel il est connecté. De ce fait, il permet de
contrôler les transits de puissance active dans les lignes. Les
dispositifs déphaseurs ont des effets bénéfiques pour les
problèmes dynamiques tels que l'amélioration de la
stabilité transitoire et l'amortissement des oscillations de
puissance.
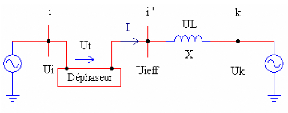
Figure II.17: Régulateur de phase dans une ligne reliant
deux générateurs [34]
Les deux principaux types de déphaseurs sont le
régulateur de phase contrôlé par thyristor TCPAR
(Thyristor Controlled Phase Angle Regulator) et le transformateur
déphaseur contrôlé par thyristors TCPST (Thyristor
Controlled Phase Shifting Transformer). D'autres dispositifs, basés
sur des convertisseurs à thyristors GTO, peuvent remplir les fonctions
de déphaseur.
II.5.4 Dispositifs FACTS combinés
série-parallèle
Les dispositifs FACTS présentés aux sections
II.5.1, II.5.2 et II.5.3 permettent d'agir uniquement sur un des trois
paramètres déterminant la puissance transmise dans une ligne
(tension, impédance et angle). Par une combinaison des deux types de
dispositifs (shunt et série), il est possible d'obtenir des dispositifs
hybrides capables de contrôler simultanément les
différentes variables précitées.
II.5.4.1 Contrôleur de transit de puissance
unifié UPFC
Le contrôleur de transit de puissance unifié UPFC
(Unified Power Flow Controller) est formé de deux
convertisseurs de tension reliés par une liaison à courant
continu formée par un condensateur. Il s'agit en fait de la combinaison
d'un STATCOM et d'un SSSC. Son schéma est représenté
à la figure (II.18).
Le principe de l'UPFC consiste à dériver une
partie du courant circulant dans la ligne pour le réinjecter avec une
phase appropriée [29] [32]. Le convertisseur 1, connecté en
parallèle, a pour fonction de prélever la puissance active et de
la délivrer au convertisseur série (2). Ce dernier
génère une tension Upq, contrôlée en
amplitude et en phase, qui est insérée dans la ligne.
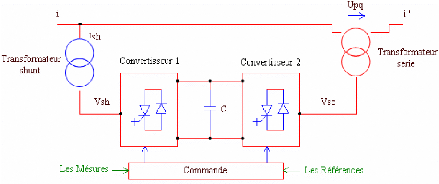
Figure II.18: Schéma de base d'un UPFC [39]
Le convertisseur shunt peut également
générer de la puissance réactive indépendamment du
transfert de puissance active et ainsi contrôler la tension Ui (figure
II.19). L'UPFC permet de contrôler simultanément les trois
paramètres régissant les transits de puissances dans les lignes
(tension, impédance et phase). Il peut de ce fait agir à la fois
sur les puissances active et réactive. En général, il
possède trois variables de commande et peut s'exploiter dans
différents modes. Le convertisseur shunt règle la tension au
noeud i alors que l'autre, branché en série, règle les
puissances active et réactive ou la puissance active et la tension au
noeud k [38].
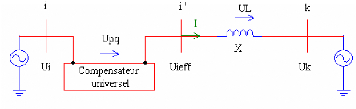
Figure II.19: Compensateur universel dans une ligne reliant deux
générateurs
Dans le cas d'une ligne munie d'un UPFC et dont la tension est
maintenue constante aux deux extrémités, la puissance active
transmise peut s'écrire [38] [39] :
U2
P pq
UU ä
= -
sinäcos +è (II.13)
ik X X 2
L'UPFC est capable de remplir toutes les fonctions des autres
dispositifs FACTS. Il peut être utilisé en particulier pour:
· le réglage de la tension;
· l'amélioration des flux de puissances active et
réactive;
· la limitation des courants de court-circuit;
· l'amortissement des oscillations de puissance.
II.5.4.2 Contrôleur de transit de puissance entre
ligne IPFC
Le contrôleur de transit de puissance entre ligne IPFC
(Interline Power Flow Controller) est utilisé dans le cas d'un
système de lignes multiples reliées à un même poste.
Son principe est illustré à la figure (II.20). L'IPFC est
formé de plusieurs SSSC, chacun d'eux fournissant une compensation
série à une ligne différente. Du coté continu, tous
les convertisseurs sont reliés entre eux via des disjoncteurs [34]
[38].
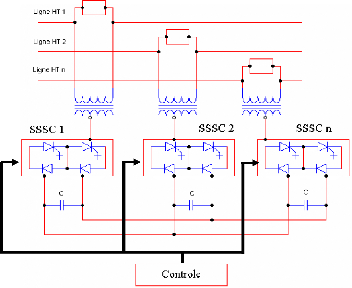
Figure II.20: Schéma du contrôleur de transit de
puissance entre lignes
L'IPFC permet de transférer de la puissance active
entre les lignes compensées pour égaliser les transits de
puissances active et réactive sur les lignes ou pour décharger
une ligne surchargée vers une autre moins chargée. Les tensions
injectées possèdent une composante en quadrature et une
composante en phase avec les courants respectifs des lignes. La composante en
quadrature permet une compensation série indépendante dans chaque
ligne, alors que la composante en phase définit le niveau de puissance
active échangée avec les autres lignes. Sur la liaison continue,
le bilan est touj ours nul [34].
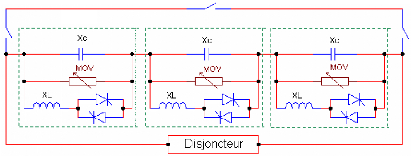
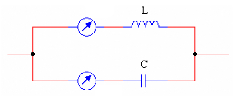
II.5.4.3 Régulateur de puissance Interphases
IPC
Le régulateur de puissance interphases IPC
(Interphase Power Controller) a été
développé pour la gestion de la répartition des puissances
[40]. Il s'agit d'un dispositif de contrôle qui est composé de
deux impédances par phase: l'une inductive et l'autre capacitive,
chacune étant directement liée à une unité de
déphasage (figure II.21). Les valeurs de ces impédances sont
élevées afin de limiter les courants en cas de court-circuit.
Dans le cas particulier où les impédances ont
des valeurs complexes conjuguées, chaque branche de l'IPC peut
être représentée par une source de courant
contrôlée en
tension. De cette manière, l'impédance
inductive et l'impédance capacitive forment un circuit bouchon à
la fréquence fondamentale. La commande de la répartition des
puissances actives et réactives à l'aide de l'IPC est obtenue en
premier lieu par les angles de déphasage Ø1 et Ø2 des
transformateurs.
Ø1
Ø2
Figure II.21: Régulateur de puissance Interphases [40]
De par sa conception, l'IPC a les aptitudes suivantes:
· le contrôle des flux de puissance active;
· la limitation des courants de court-circuit;
· le découplage des tensions entre deux noeuds.
Il permet également d'obtenir un contrôle de la
puissance réactive indépendant de la puissance active. À
l'heure actuelle, l'IPC est le seul moyen pour l'interconnexion des
réseaux qui soit en mesure d'empêcher la propagation des
perturbations entre les réseaux interconnectés.
II.6 Synthèse
Les différents dispositifs FACTS
présentés dans ce chapitre possèdent tous leurs propres
caractéristiques tant en régime permanent qu'en régime
transitoire. Chaque type de dispositif sera donc utilisé pour
répondre à des objectifs bien définis. Des
considérations économiques entreront également dans le
choix du type d'installation à utiliser. Le tableau (II.1)
synthétise les principaux bénéfices techniques des
différentes technologies de FACTS. Le nombre "+" est proportionnel
à l'efficacité du dispositif.
Tableau II.1: Bénéfices techniques des
dispositifs FACTS [34]
|
Dispositif
|
Contrôle du transit
de puissance
|
Contrôle de La tension
|
Stabilité transitoire
|
Stabilité statique
|
SVC
|
+
|
+ + +
|
+
|
+ +
|
STATCOM
|
+
|
+ + +
|
+ +
|
+ +
|
TCSC/GCSC
|
+ +
|
+
|
+ + +
|
+ +
|
SSSC
|
+ +
|
+
|
+ + +
|
+ +
|
TCPST
|
+ + +
|
+
|
+ +
|
+ +
|
UPFC
|
+ + +
|
+ + +
|
+ + +
|
+ + +
|
IPFC
|
+ + +
|
+
|
+ + +
|
+ +
|
|
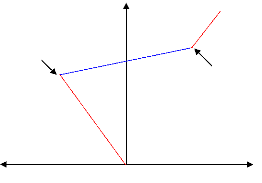
Plus précisément, la figure (II.22) illustre
l'effet de chacun des diposistifs de la première et de la
deuxième génération sur les différents
paramètres régissant le transit de puissance active dans une
ligne.
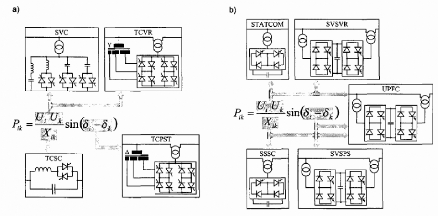
Figure II.22: Paramètres contrôlés par les
différents dispositifs FACTS:
a) avec thyristors, b) avec
convertisseur GTO.
II.7 Conclusion :
Nous avons présenté dans ce chapitre, en
premier lieu les techniques de compensation conventionnelles (série et
shunt), ainsi nous avons donné une définition et une
classification des divers types de contrôleurs FACTS comme le SVC,
STATCOM, TCSC, SSSC, UPFC, IPFC. Cette classification est adoptée comme
classification universelle des systèmes FACTS. La plupart d'entre eux
sont déjà en service dans la pratique.
Le choix des contrôleurs particuliers cependant,
dépend de la condition d'application et de l'exécution
désirée. Les débuts d'analyse avec l'étude et les
problèmes d'identification de système se sont associés au
système existant.
Si aujourd'hui les FACTS sont encore peu utilisés par
rapport à leur potentiel, les évolutions techniques de
l'électronique de puissance vont rendre les solutions FACTS de plus en
plus compétitives face aux renforcements des réseaux.
Nous avons choisi d'étudier le SVC (Static Var
Compensator) comme dispositifs FACTS pour contrôler et améliorer
la tension et la puissance réactive dans un réseau de transport
d'énergie électrique. Une étude profonde concerne la
modélisation et la commande du contrôleur SVC sera
détaillée dans le prochain chapitre.


III.1 Historique du SVC
Le compensateur statique de puissance réactive SVC
(Static Var Compensator) est apparu dans les années soixante-dix, le
premier SVC est installé dans l'ouest de Nebraska, au l'Amérique
du Nord [18] [41], pour répondre à des besoins de stabilisation
de tension rendue fortement variable du fait de charges industrielles
très fluctuantes telles que les laminoirs ou les fours à arc. Les
SVC sont des FACTS de la première génération. Ils
utilisent des thyristors classiques, commandables uniquement à
l'amorçage. Plusieurs conceptions différentes ont
été proposées. Toutefois, la plupart des SVCs sont
construits à partir des mêmes éléments de base
permettant de fournir ou d'absorber de la puissance réactive.
Depuis 1970 plus de 300 SVC est installé autours du
monde, plus de 90 installer au Amérique du Nord. La figure (III.1)
montre évolution d'installation du SVC dans le monde jusqu'à
l'année 2006 [18].
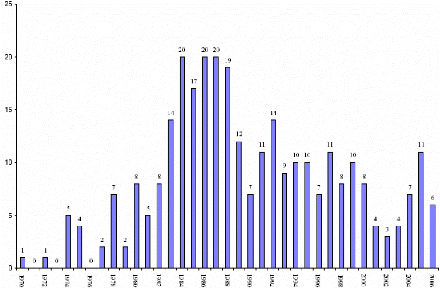
Figure III.1: Nombre approximatif d'installations du SVC de 1970
à 2006 [18]
(basé sur Liste compilée on 2006 par Groupe IEEE
I4 travaillé sur SVC et autre données des fabricants)
III.2 Définition du SVC
Le compensateur statique de puissance réactive (SVC ou
CSPR) est un dispositif qui sert à rnaintenir la tension en
régime permanent et en régime transitoire à
l'intérieur de limites désirées. Le SVC injecte de la
puissance réactive dans la barre où il est branché de
manière à satisfaire la demande de puissance réactive de
la charge [42].
Le Compensateur Statique de Puissance Réactive est un
dispositif de compensation parallèle a base des composantes
d'électronique de puissance.
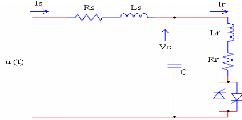
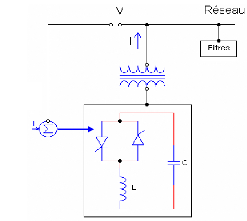
Figure III.2 : Schéma d'un SVC de type TCR-FC
Cette analyse du SVC ne comporte pas l'étude des
transitoires ni celui de la stabilité du circuit. Il se limite à
l'étude du SVC et ces composants en régime permanent.
Les dispositifs FACTS comme il a été
mentionné dans l'introduction font en général appel
à des éléments de l'électronique de puissance. Ces
éléments sont utilisés depuis quelques années
seulement. Le principal problème concernant l'utilisation de ceux-ci
dans un dispositif FACTS est le contrôle. Le thyristor est dans la
plupart des cas l'élément qui permet de contrôler ces
dispositifs. L'opération d'un thyristor présente des
caractéristiques spéciales. Par exemple, il est à la
source des effets non linéaires et de la présence d'harmoniques
dans les circuits qui comportent une branche TCR.
III.3 Opération d'un thyristor
Le thyristor est un élément redresseur à
semi-conducteur. Il a deux modes d'opération: il est soit dans
l'état allumé ou de conduction, soit dans l'état
éteint ou de non-conduction. Le début de la conduction est
appelé l'amorçage ou l'allumage et la fin de la conduction est
appelée l'arrêt [42].
La figure (III.3) nous montre le symbole du thyristor ainsi
leurs paramètres. On peut y identifier les paramètres suivants:
le courant dans le thyristor (I), la tension dans l'anode (VA), la tension dans
la cathode (VC) et la tension de gâchette (VG).
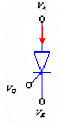
I
Figure III.3 : Schéma d'un thyristor
La figure (III.4) présente la caractéristique
statique du thyristor. Sur cette figure on peut voir que le thyristor se
comporte comme une résistance à deux états qui
correspondent aux états du thyristor. La valeur de cette
résistance change de Rfjd lorsque le thyristor est
en mode de conduction à Rrev lorsque il est en mode
non-conduction. L'arrêt de conduction se produit en fonction du courant
qui circule entre l'anode et la cathode, et l'amorçage en fonction d'une
tension de valeur élevée (tension de retournement) [42].
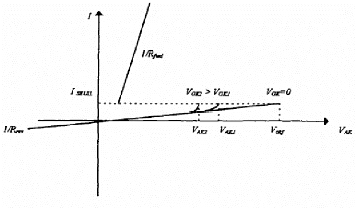
Figure III.4 : Caractéristiques statique du thyristor
[42]
La tension de retournement Vakf est la
tension entre l'anode et la cathode à laquelle l'élément
semi-conducteur se polarise et laisse passer le courant, passe à
l'état allumé. A l'allumage, la résistance du thyristor
passe de Rrev de valeur élevée à
Rfjd de valeur plus faible. La tension de retournement est
élevée, elle peut être diminuée par l'application
d'une
tension entre la gâchette et la cathode
VGK. Plus la tension VGK est grande
moins sera élevée la tension de retournement nécessaire
à l'allumage du thyristor.
La figure (III.4) montre la tension de retournement
Vakf à laquelle correspond une tension VGK
égal à zéro. On montre aussi deux autres
tensions VAK1 et VAK2 dont
les tensions VGK pour l'allumage du thyristor sont aussi
montrées. Le courant de seuil ISEUIL est le courant
minimal pour que la conduction se produite et persiste. De même, la
tension VAK
et la tension VGK possèdent aussi
un seuil VAK SEUIL et VGK SEUIL ,
respectivement.
III.4 Constitution du SVC
Le compensateur statique SVC est composé de plusieurs
éléments tel que le condensateur fixe (FC), qui est
commandé par des éléments mécaniques; d'une
réactance commandée par thyristors (TCR), et de condensateurs
commutés par des thyristors (TSC), et parfois de réactance
commutée par thyristors (TSR), et des filtres d'harmoniques [42].
III.4.1 Condensateur fixe (FC)
Le condensateur fixe fournit à la barre une puissance
réactive fixe, il est connecté au réseau
mécaniquement et comporte un contrôle pour l'ouverture du
disjoncteur qui le relie à la barre.
III.4.2 Réactance commandée par
thyristors (TCR)
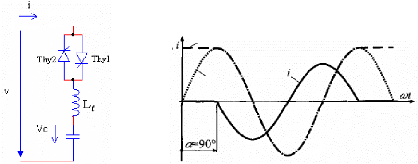
III.4.2.1 Principe de fonctionnement
La réactance commandée par thyristors TCR
(Thyristor-Controlled Reactor) possède une bobine d'inductance
fixe L branchée en série avec une valve à thyristors
bidirectionnelle montré sur la figure (III.5.a). La réactance
contrôlée par thyristors permet un contrôle plus fin de la
puissance réactive car elle permet un contrôle continu du courant
de compensation.
Les thyristors sont enclenchés avec un certain angle
d'allumage á et conduisent alternativement sur une demi-période.
On définit l'angle d'allumage á à partir du passage par
zéro dans le sens positif de la tension aux bornes du thyristor à
allumer. L'angle de conduction ó est l'angle pendant lequel les
thyristors conduisent. Un thyristor se met à conduire quand un signal de
gâchette lui est envoyé et la tension à ses bornes est
positive. Il s'arrête de conduire lorsque le courant qui le traverse
s'annule. Les thyristors sont
allumés de façon symétrique toutes les
demi périodes. Le courant à fréquence fondamentale est
réglé par la commande de phase de la valve à thyristors
[34] [43]. En pleine conduction (a = 90°), le courant est essentiellement
réactif et sinusoïdal, et lorsque a = 180°, on est en
conduction nulle.
La relation qui lie angle d'allumage et angle de conduction
en régime permanent est : ó =
2(ð-á) (III.1)
Une conduction partielle des thyristors est accomplie avec un
angle d'amorçage a compris entre 90° et 180°, a pour effet de
réduire la fondamentale du courant (fig.III.5.b), et donc de diminuer la
susceptance apparente de l'inductance (fig.III.6.a).
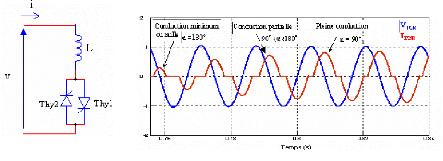
(a) (b)
Figure III.5: Réactance commandée par thyristors-
a) Montage, b) tension simulé et courant inductif résultant pour
un angle d'amorçage donné

L'équation dynamique qui régit le mode de
fonctionnement du TCR est v(t)= 2 V sin co t,
La valeur instantanée du courant dans la réactance
TCR est :

ùt
iTCR
()=1 2
t2sin= (-)
V

ùcoscos
Vtdt áùt(III.2)
L ù L
á

2
V
XL
positive, a
<> +
cot ac
()
cos cos , pour la demi période
á
ù
- t

(() )()()
cos cos , pour la demi période négative, acot a
c
á ðùðð
+- + < > ++
t
(III.3)
2
V
=
i L
XL
()
á
Où V : tension efficace et XL = co L:
réactance pour fréquence fondamentale du TCR.
Une décomposition en série de Fourier donne pour
l'amplitude de la fondamentale :
1àá =
() [ ( ð á )(á)]
V
IL 2 - + sin
2(III.4)
ðùL
Equation (III.4) peut être écrit comme :
(a)BLeff(a).V = (III.5)
1
à
I L
avec BLeff est la susceptance effective du TCR qui
varie de la même manière que la fondamentale du courant :
BLeffaBL.
()[2(ita)sin (2 a)]
1
=- + (III.6)
Cette loi du contrôle est montrée dans la figure
(III.6). La valeur maximale de BLeff est 1/XL, obtenue avecá =
90° , c'est, conduction pleine dans le contrôleur du thyristor. La
valeur minimum est zéro, obtenue avec á = 180°. Ce
principe est appelé le contrôle de phase [31] [34].
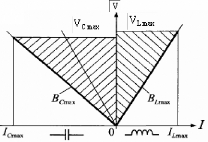
La variation du BLeff en fonction de a est
illustrée sur la figure (III.6.a). Pour une tension donnée V, le
courant absorbé dépend de la valeur de la susceptance effective.
La zone de fonctionnement d'un TCR est délimitée par les valeurs
maximales de la susceptance BL, de la tension VLmax et du courant
ILmax (figure III.6.b).
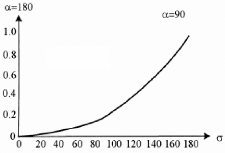
XL BL(a)
(a) (b)
Figure III.6 : Principe de contrôle du TCR, a) Susceptance
apparente, b) Zone de fonctionnement [34] [44]
III.4.2.2 Harmoniques
Augmentation de l'angle d'amorçage (réduction
de l'angle de conduction) a deux autres effets importants. En premier, les
pertes des puissances diminuent dans le contrôleur TCR [21]. La seconde,
le courant devient de moins en moins sinusoïdal et contient des
harmoniques. Ces harmoniques passent ou se transmettent du circuit TCR au
circuit SVC, qui a une importance capitale pour le fonctionnement du SVC. Si
les angles d'amorçages sont équilibrés, (c.-à-d.
égal pour les deux thyristors), d'autres harmoniques sont produits, et
la valeur efficace évaluent du composant harmonique énième
est donné par [31] [34] :
In
4sin1V() n+á sin +
ðX2.1
()
n+
()n -1
(III.7)
() ()()
á sinná
-cos.
á
L
2.1
n-n
Le tableau (III.1) donne l'amplitude maximale des l'harmoniques
jusqu'aux 37ième.
Les valeurs sont exprimées comme un pourcentage
d'amplitude du composant fondamental en pleine conduction [21].
Tableau III.1: Amplitudes maximales de
courants harmoniques
dans TCR
|
Ordre d'harmoniques
|
Pourcentage
|
1
|
100.00
|
3
|
(13.78)b
|
5
|
5.05
|
7
|
2.59
|
9
|
(1.57)
|
11
|
1.05
|
13
|
0.75
|
15
|
(0.57)
|
17
|
0.44
|
19
|
0.35
|
21
|
(0.29)
|
23
|
0.24
|
25
|
0.20
|
27
|
(0.17)
|
29
|
0.15
|
31
|
0.13
|
33
|
(0.12)
|
35
|
0.10
|
37
|
0.09
|
|
Les réactances contrôlées par thyristors
sont habituellement connectés en triangle pour éliminée
harmonique trois et multiple de trois (3ième , 9ième , 1
5ième , etc).
Plusieurs méthodes sont utilisées pour
réduire l'amplitude de courants d'harmoniques produits par le TCR, parmi
ces méthodes:
· Mise en parallèle de m TCRs
contrôlés séquentiellement (séparément), Dans
ce cas eqn. (III.7) sera divisée par le facteur m, et l'amplitude de
chaque harmonique sera réduit.
· Emploie des filtres d'ordre réduit pour
éliminée les harmoniques d'ordre bas (5ième,
7ième , 11 ième).
Lorsque l'angle d'allumage (amorçage) est fixe, on
parle d'inductance commutée par thyristor TSR (Thyristor-Switched
Reactor). Généralement á vaut 90°. Dans ce cas,
les thyristors sont en pleine conduction sur un nombre entier de
demi-périodes et le TSR ne génère pas de courants
harmoniques. En revanche, la valeur de la susceptance effective n'est pas
modulable et il n'y a que deux cas de fonctionnement possibles. Lorsque les
thyristors sont enclenchés, le courant réactif IL absorbé
par le TSR est proportionnel à la tension appliquée V. il est nul
lorsque la valve à thyristors reste ouverte. Les valeurs maximales
admissibles du courant et la de tension doivent être respectées
(fig. III.1 6.b). Le recours à plusieurs branches TSR connectées
en parallèles permet d'obtenir une admittance réactive
contrôlable par palier, tout en conservant un courant sinusoïdal
[34].
III.4.3 Condensateur commuté par thyristors
(TSC)
Le condensateur commuté par thyristors TSC
(Thyristor-Switched Capacitor) est composé d'un condensateur
fixe C branché en série avec une valve à thyristors
bidirectionnelle et une bobine d'inductance d'atténuation L~
(fig.III.7.a). Le commutateur a pour rôle de d'enclencher et de
déclencher le condensateur pour un nombre entier de demi-cycles de la
tension appliquée. Le condensateur n'est ainsi pas commandé en
phase, mais simplement enclenché et déclenché.
L'inductance d'atténuation sert à limiter le courant en cas de
fonctionnement anormal et à éviter la résonance avec le
réseau à des fréquences particulières [21] [34].
Pour avoir un minimum de perturbations transitoires, les
instants de commutation sont choisis de façon à ce que la tension
aux bornes des thyristors soit minimale.
L'enclenchement est donc réalisé lorsque la
tension résiduelle du condensateur est égale à la tension
instantanée du réseau (fig.III.7.b).
v
vC
n
|
=
|
|
|
X C
|
|
|
|
|
1
|
(III.12)
|
|
|
|
XL
|
|
|
|
w0
|
LC
,
|
|
|
|
|
|
|
|
|
(a) (b)
Figure III.7: Condensateur commuté par thyristors: a)
montage, b) courant et tension dans la capacité
Le condensateur peut être commuté avec un
minimum de transitoire si le thyristor est allumé (état on), au
l'instant quand la tension VC du condensateur et la tension V du réseau
ont la même valeur. La tension v(t) est donnée par:
()(0) () ()()
0
dit1
VtVsinwtaL.
= += , +
m C
it.dtV
+ (III.8)
dt C
V
()()
1
,+ (III.9)
C 0
VpL.p
=Ip+
C.pp
VC0: Tension de condensateur à l'instant t = 0.
Par plusieurs manipulations et transformation inverse que nous
obtenons, le courant instantané est exprimé comme:
2
(III.10)
n
itI.coswtanB.
()()
= + +VsinaVsin(wt)Icosa.cos(wt)
mC r m r
- -
0
m C
n1
2 0
- avec ù0 fréquence
fondamentale et ùr la fréquence de
résonance du système donnée par:
n w0 (III.11)
1
wr =

LC
,
Le courant maximale Im est donnée par:
2
(III.13)
n
I V . B . 2
m m C -
=
n1
La présence de l'inductance d'atténuation rend le
régime transitoire oscillant. En cas d'enclenchement, le courant en
régime permanent est donnée par:
2
(III.14)
()B.cos(ùt)
n
itV.
= m-
2C 0
n1
La susceptance étant fixe, le courant dans le TSC
varie linéairement avec la tension V (qui explique l'absence des
harmoniques sur le TSC). La zone de fonctionnement est similaire à celle
d'un TSR; elle est illustrée à la figure (III. 8.a).
Généralement le SVC de type TSC contient n banc de TSC
montés en parallèle. La susceptance est ajusté par le
contrôle du nombre de condensateurs parallèles en conduction.
Chaque condensateur conduit touj ours pour un nombre intégrant de
demi-cycle. La relation qui relie le courant de compensation et le nombre de
condensateurs en conductions est montrée dans la figure (III. 8.b).
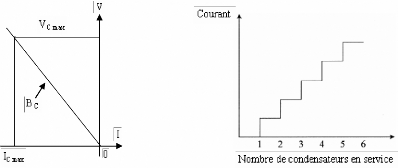
(a) (b)
Figure III.8: Principe du contrôle de TSC, a) zone de
fonctionnement, b) relation entre courant et nombre de condensateurs en
service
Plusieurs TSC de tailles différentes peuvent
être mis en parallèle, de façon à former un banc de
condensateurs enclenchables et déclenchables par thyristors. Dans
certaines installations, les commutations sont parfois réalisables par
disjoncteurs. Ce type de dispositif porte le nom de condensateur commuté
mécaniquement MSC (Mechanically-Switched Capacitor).
Les MSC sont des dispositifs conçus pour n'être
enclenchés et déclenchés que quelques fois par jour. De ce
fait, leur fonction principale est de fournir de la puissance réactive
en régime permanent.
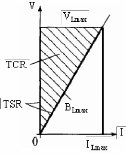
III.5 Schémas de SVC
La figure (III.9.a) présente différentes
configurations possibles de SVC. Lorsque le dispositif comporte une anche de
type TCR, un filtre permett ant de réduire les harmoniques est
rajouté. La zone de fonctionnement équivalente du SVC est obtenue
par la combinaison des zones de toutes les branches. Un exemple est
donné à la figure (III.9.b).

(a)
(b)
Figure III.9 : Compensateur statique de puissance
réactive, a) schémas, b) zone de fonctionnement
III.6 Principe de fonctionnement du SVC
Le SVC est utilisé fondamentalement pour
contrôler la tension à la barre où il est connecté
au réseau électrique, de façon à obtenir un profil
plat de la tension. Pour ce faire, il doit générer ou absorber de
la puissance réactive à ses bornes [42].
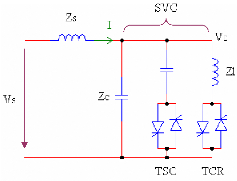
Figure III.10 : Schéma d'un SVC de type TCR-TSC-FC
La figure (III.10) décrit le circuit équivalent
du SVC formé d'un condensateur fixe (FC) et d'un banc de condensateurs
commuté par thyristor (TSC) et d'un banc d'inductance variable
commandée par thyristor (TCR). Mais où l'on considère
seulement un TSC et un TCR. La tension aux bornes de la barre où le SVC
est branché, VS , et l'impédance ZS sont la tension et
l'impédance équivalent de Thévenin du réseau vues
de la barre.
Le but du SVC est de maintenir la tension VC aux bornes du
SVC fixe. Lorsque la tension VS diminue, le contrôle du SVC doit
connecter le condensateur fixe (FC), si la tension diminue encore on doit
connecter aussi le TSC. Par contre, lorsque la tension VS augmente, le TCR doit
entrer en fonctionnement.
III.7 Modélisation de dispositif
SVC
Les dispositifs FACTS shunt modélisés sont des
compensateurs statiques de puissances réactives tels que le SVC et
autres dérivés (TCR, TSC). Bien qu'ils présentent des
performances moins bonnes que le compensateur statiques synchrone, elles ne
sont guère importantes en régime permanent. De plus, les
simulations sont réalisées pour des cas où les tensions
sont proches de la valeur nominale. Dans cette situation, le SVC et le STATCOM
présentent des caractéristiques semblables [34] [45].
III.7.1 Modèle de compensateur statique de
puissance réactive SVC
Le dispositif SVC est modélisé par une admittance
shunt ySVC variable (fig.III. 11 .a). Le SVC étant
supposé sans pertes, l'admittance est donc purement imaginaire:
y SVC = j b (III.15)
SVC
La susceptance bSVC peut être de nature
capacitive ou inductive afin de fournir, respectivement d'absorber, de la
puissance réactive QSVC (fig.III. 11 .b).
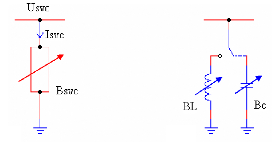
(a) (b)
Figure III.11 : Modélisation du SVC, a) symbole, b)
modèle
[ ( ) ]
in2á
2CLX2ðás - +-ðX
Les valeurs des SVC sont exprimées sous forme de
puissance réactive QSVC absorbée à la tension
nominale Un. La correspondance avec la susceptance bSVC est
donnée par la relation [34]:
B U .bU.
2 (III.16)
SVC n
= -=-
SVC n ðXX
CL
La puissance réactive réellement absorbée
par le SVC est donnée par:
U2
Q= - (III.17)
SVCB SVC
n
U
Le signe « moins » indique que le SVC fournit de la
puissance réactive au système lorsqu'il est capacitif alors qu'il
en consomme lorsqu'il est inductif. La variation de la puissance
réactive injectée en fonction de la tension est
représentée à la figure (III.12) pour plusieurs valeurs de
compensation [34].
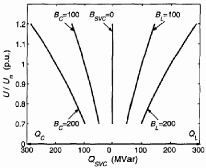
Figure III.12 : Variation de la puissance réactive par un
SVC en fonction de la tension nodale
Les installations FACTS sont généralement
situées à des postes déjà existants. Toutefois, les
deux cas sont en considérations ; à savoir lorsque le SVC est
placé en un noeud et lorsqu'il est situé au milieu de la
ligne.
| 

