2.2. Détection a seuil fixe
La détection des impulsions radar noyé dans le
parasite peut être formulée comme un problème de test
d'hypothèse .L'hypothèse nulle, notée H0, indique que le
signal reçu est dû au parasite et/ou bruit seulement, tandis que
l'hypothèse alternative, notée H1, indique que le signal
reçu est dû à une impulsion radar plus le parasite et/ou le
bruit. Ce test d'hypothèse peut être caractérisé en
terme de performances pour un système de détection radar par la
probabilité d'erreur (probabilité de fausse alarme), qui revient
à décider H1 tandis que H0 est vraie, et de la probabilité
de non détection qui revient à décider H0 tandis que H1
est vraie.
La règle de décision utilisée dans le
domaine de détection radar est celle conçue sur la base du
critère de NEYMAN-PEARSON, qui exige la connaissance
à priori des distributions du parasite et de la cible.
2.2.1. Région de décision
Soit R l'ensemble des valeurs que peut prendre
l'échantillon du signal radar. On distingue deux régions de
décisions R0 et R1 séparées par un seuil dit seuil de
décision (Figure 2.1).
H1 reconnue : signal utile présent
H0 reconnue : signal utile absent

Temps
Y
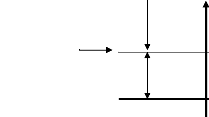
Seuil de décision
R1
R0
Figure 2.1 : régions de décision
Par rapport au seuil de décision quatre cas se
présentent (tableau 2.1):
Tableau 2.1 : les erreurs de détection
|
Observation Décision
|
vraie
|
|
H0
|
H1
|
|
Reconnue
|
H0
|
Pas d'erreur
|
Non-détection
|
|
H1
|
Fausse alarme
|
Pas d'erreur
|
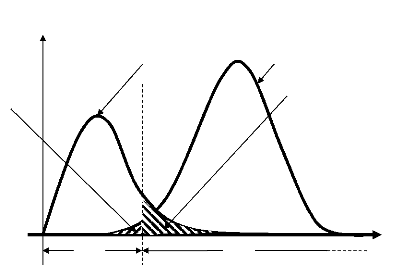
Soit ????(????|????1) la fonction de distribution de
probabilité sous l'hypothèse H1 et ????(????|????0) la fonction
de distribution de probabilité sous l'hypothèse H0,
ainsi:
1. Lorsque H1 est reconnue et H1 est vraie, on a une
détection du signal utile dont la probabilité de détection
est donnée par :
???????? = ~ ????(????|????1) ????????
????1
2. Lorsque H0 est reconnue et H1 est vraie, c'est une erreur
(nondétection) dont la probabilité est donnée par :
???????? = ~ ????(????|????1) ????????
????0
3. Lorsque H0 est reconnue et H0 est vraie, le bruit est au
dessous du seuil :
???????? = ~ ????(????|????0) ????????
????0
4. Lorsque H1 est reconnue et H0 est vraie, l'erreur est
appelée fausse :
???????????? = ~ ????(????|????0) ????????
????1
En plus on sait que la probabilité de reconnaitre H0 sans
faire d'erreur
(????????), et la probabilité de fausse alarme
(????????????) son reliées par l'équation:
???????? + ???????? ???? = 1
De même pour les probabilités de
non-détection et de détection :
46
R0 R1
????
???? (????)
????(????|????0)
????????
????(????|????1)
????????????
Figure 2.2 : probabilité des erreurs de détection
; probabilité de non détection
et probabilité de fausse
alarme
| 

