I.2.4.2. La stabilité du système asservi
Le tout premier rôle d'un asservissement est d'assurer
la stabilité du système en boucle fermée. Car cela
implique directement, la sécurité de l'installation. Un
système est stable, si à une variation bornée, du signal
d'entrée correspond une variation bornée du signal de sortie. Une
variation d'un signal est dit bornée, lorsqu'elle est constante en
régime permanent. (Prouvost, 2004)
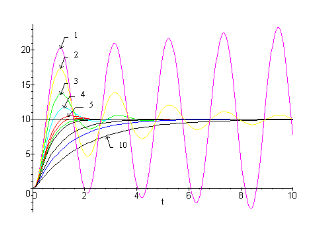
Figure I. Courbes représentatives des
systèmes stable, instable, et a la limite de
stabilité
I.2.4.2.1. Condition de stabilité
Considérons un système en boucle fermée
avec G(s) la fonction de transfert de la boucle de rétroaction et H(s)
la fonction de transfert réglant et C(s) la fonction de transfert du
correcteur. Nous avons :
Figure I.17 Système asservis
corrigé
Nous pouvons exprimer la fonction de transfert en boucle
fermée du système réglé ou corrigé nous
aurons :
La nature du régime transitoire dépend des
pôles du dénominateur de la fonction de transfert. Il est
démontré que si tous les pôles du dénominateur sont
tous à partie réelle négatifs, la réponse
temporelle est convergente alors le système est dit stable. Si l'un des
pôles est à partie réelle positive, le système est
instable. (Prouvost, 2004)
En bref, comme condition, si tous les pôles de sa
fonction de transfert en boucle fermée, sont à partie
réelle négatives.
I.2.4.2.2. Point critique de stabilité
Soit l'équation caractéristique d'un
système asservi à retour unitaire
Ou
) +1=0 (I.24)
Avec Wc la pulsation d'oscillation pour un
système dont le signal de sortie est sinusoïdale. L'équation
caractéristique nous permet d'obtenir les conditions limites de
stabilité.
Dans la courbe représentative des fonctions de
transfert, le point singulier de module 1 et d'argument - est le appelé
point critique de stabilité.
I.2.4.2.3. Critère de stabilité
I.2.4.2.4. Critère algébrique
a) Critères algébriques isochrone
Ce critère permet de déterminer si un
système est stable ou non.
Considérons la fonction de transfert en boucle ouverte
pour un système asservi à retour unitaire on
écrit les conditions limites de stabilité.
- Condition d'amplitude :
- La condition de phase :
On détermine la pulsation à partir de la
condition de phase. On calcule le gain critique Gc à l'aide
de Wc et de la condition d'amplitude.
Le système en boucle fermée est stable si pour
la pulsation critique Wc on a . Le système en boucle
fermée est instable si pour la pulsation critique Wc, on a
b) Critères de Routh hurwitz
Considérons un système asservi de fonction de
transfert avec comme dénominateur :
- Si l'un des coefficients ai sont
différents de zéro, il suffit qu'il ne soit pas tous de
même signe pour conclure à l'instabilité
- Si tous les coefficients ai sont de même
signe, l'examen de la première colonne du tableau de Routh permet de
conclure à la stabilité du système
On établit alors le tableau de Routh.
|
Poser
|
Sn
Sn-1
|
an
an-1
|
an-2
an-3
|
an-4
an-5
|
|
sn-2
|
A1
|
A2
|
A3
|
|
Calculer
|
sn-3
|
B1
|
B2
|
B3
|
|
....
|
|
|
|
|
s²
|
M1
|
M2
|
|
|
S'
|
N1
|
N2
|
|
|
s°
|
O1
|
|
|
|
|
|
|
|
Tableau I.2. Tableau de Routh
Avec :
Routh a établit que le système est stable si
tous les termes de la première colonne sont de même signe. Dans le
cas contraire, le nombre de changement de signe, donne le nombre de pôles
instables. (Prouvost, 2004)
I.2.4.2.5. Critère graphique
Ce critère permet de juger de la stabilité ou de
l'instabilité d'un système asservi à partir de la courbe
représentative de sa fonction de transfert en boucle ouverte
. On écrit simplement.
a) Règle du revers dans le plan de Nyquist
La règle est telle qu'un système asservi
à retour unitaire est stable, si en décrivant le lieu de nyquist
de la fonction de transfert en boucle ouverte, dans le sens des pulsations
croissantes, on laisse le point critique de coordonnée (-1, 0) à
sa gauche. Il est instable dans le cas contraire.
Figure
I.18 lieu de nyquist, pour un système stable, est
instable
b) Règle du revers dans le plan de Black
Un système asservi à retour unitaire est stable
si en décrivant la courbe représentative de sa fonction de
transfert en boucle ouverte dans le sens des pulsations croissantes, on laisse
le point critique (0 dB, -180°) à sa droite. Il est instable dans
le cas contraire.
Figure
I.19 Lieu de black, pour un système stable et instable
c) Règle du revers dans le diagramme de Bode
Un système asservi à retour unitaire est stable,
si pour la pulsation Wc, la courbe du logarithme du module de A(jw)
passe en dessous du niveau 0 dB et instable dans le cas contraire.
Figure
I.20 Diagramme de Bode pour un système stable et instable
| 

