La solution d'équilibrage dissipative consiste
à dissiper une partie de l'énergie stockée dans le
supercondensateur à tension élevée. La dissipation de
cette énergie excessive ramène la surtension à une valeur
de fonctionnement correcte.
5.4.1.1. Système d'équilibrage
passif
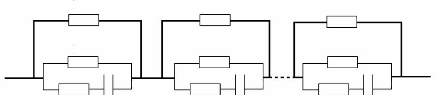
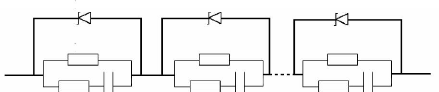
Dans la solution passive, nous plaçons en
parallèle aux bornes de chaque cellule des résistances
d'équilibrage d'une valeur Req comme
représenté par le schéma sur la figure 5-13 [160, 154]. Le
mécanisme de ce type d'équilibrage est simple par son principe :
un courant parcourt toujours la résistance d'équilibrage
connectée à ses bornes. Plus la tension est forte
plus le courant dans la résistance d'équilibrage
est important, ce qui permet d'homogénéiser les tensions aux
bornes des différents composants.
Req1 Req2
Reqn
Rf1
Rf2 Rfn
ESRl ESR2
ESRn

Cl C2
Cn

Usc1 Usc2
Uscn

Umod
Fig. 5-13 : Module de supercondensateurs avec un
système d'équilibrage passif
Nous définissons le facteur d'équilibrage
Keq par la relation 5-23. Ce dernier donne la
proportionnalité de la résistance d'équilibrage
Req par rapport à la moyenne des résistances
de
fuite R f . D'après la référence
[149], sa valeur peut être comprise entre 5% à 10%.
R eq
K = 5-23
eq
Rf
5.4.1.1.1. Calcul du nouveau facteur de dispersion de la
résistance de fuite
Nous montrons dans ce paragraphe l'effet de l'emploi des
résistances d'équilibrage Req aux bornes des
supercondensateurs sur la dispersion de ses paramètres. Pour simplifier
l'analyse, la dispersion de la résistance d'équilibrage est
négligée.
Dans le cas de la dispersion de la résistance de fuite,
la résistance équivalente Rpmax des deux
résistances en parallèle Rfmax (la plus
élevée) et Req peut être
calculée par la formule suivante :
R R
. R . (1 )
eq f + K
eq f
max
R = = 5-24
max R R
+ K K
+ +
eq f eq f
max
1
p

En raison du nombre n de cellules en série
élevé, la moyenne des résistances (Rp)
en parallèle peut être approximée avec une faible erreur
comme suit :

1 nn R R R R
1 e f
. .
q eq f R
i eq
R = ? =
R =
p ? ?
p 5-25
n i n 1
1 1 R R
i + + K +
= i = eq f R R
eq f eq
i
En considérons les résistances
d'équilibrage, un nouveau facteur liée à la dispersion de
la résistance de fuite peut être défini par
l'équation suivante :
R -R
p p
max
K 5-26
f ' =
R p
d'où, en considérant les équations 5-24,
5-25 et 5-26 :
K K
f eq
.
K f K K
' = 5-27
+ + 1
f eq
Nous montrons sur la figure 5-14 le facteur de dispersion
(calculé par l'équation 5-27) en fonction du facteur
d'équilibrage pour certai es valeurs du facteur de dispersion de la
n
résistance de fuite Kf. Nous remarquons que
l'utilisation d'une résistance d'équilibrage diminue largement la
dispersion de la résistance de fuite et par conséquent le nombre
de cellules requis en série pour une tension donnée (cf. eq.
5-6). En conclusion, pour un facteur d'équilibrage faible (entre 5%
à 10%) la dispersion peut pratiquement disparaître entre les
cellules d'un module. La durée de vie des cellule s est alors quasiment
égale (si les différences de température entre cellules
sont exclues).
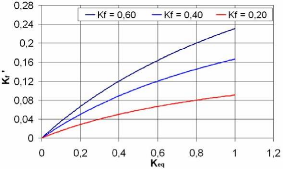
Fig. 5-14 : Evolution de la dispersion de la
résistance en fonction du facteur d'équilibrage
5.4.1.1.2. Calcul du temps
d'équilibrage
Dans le cas d'une dispersion de la capacité et de la
résistance de fuite, le calcul de la performance du système
d'équilibrage est difficile et dépend du profil de courant. Nous
nous proposons donc de le simuler.
Définissons un nouveau paramètre lié
à l'équilibrage à savoir le temps d'équilibrage.
Nous distinguerons en fait deux temps d'équilibrage lors de
l'étude de ces systèmes. Le premier est le temps Teq
pour que les tensions instantanées des cellules du module
s'égalent. Le deuxième le temps TU est le temps
nécessaire pour que la tension aux bornes d'une cellule
présentant une surtension atteigne la tension nominale UN.
Dans les applications ayant un rapport cyclique bas, les
temps d'équilibrage sont principalement dûs à la valeur de
la capacité du supercondensateur et à la résistance
d'équilibrage. Reprenons le module présenté dans le
paragraphe 5.2.1 et considérons seulement la dispersion de la
capacité. Les résistanc es ESR des différents
composants sont négligées.
En fin de la charge, la tension aux bornes de la
capacité C2 peut être exprimée en fonction de la
tension de la capacité C1 et du facteur de la dispersion
Kc à partir de la loi de la conversation de charge
par la formule suivante :
U sc = Usc 1 5-28
°' 1 + K c
02
Au moment de l'équilibrage (temps Teq), les
tensions des cellules sont égales et peuvent être écrites
par le système d'équations suivant en remplaçant la
résistance Rp par sa valeur de l'équation
5-25 :
usc ( eq)= U s.
.exp 1T eq =U
T
.
Rp C
[ Jsc01.exp [- T
eq. (1 + K eq 5-29
)j
Req. C
? T ? ? T + K ?
eq . (1 )
eq eq
u T
( ) = U . exp ?? - ?? = U . exp ?? - ??
5-30
sc2 eq sc sc
02 02
R C K
. (1 )
+ R C K
. . (1 )
+
? p C ? ? eq C ?
A noter que les deux tensions ci-dessus sont données sans
la dispersion sur les résistances de fuite.
Le temps d'équilibrage peut être obtenu par
l'équation ci-après en égalisant les deux dernières
équations et en considérant l'équation 5-28 :
eq 5-31
ln(1 ) . (1 )
+ K + K
c c
T = . .
C R
eq K c. (1 + Keq)
Dans certaines applications, il n'est pas nécessaire
d'équilibrer les tensions instantanées des cellules mais
seulement de réduire la surtension Umax à la
tension nominale. Ce dernier équilibrage permet de limiter la
dissipation d'énergie dans les systèmes d'équilibrage. Si
le supercondensateur SC2 de capacité C2
présente une surtension Umax, nous pouvons
identifier l'instant TU où la tension nominale est atteinte
à partir de l'équation suivante :
?T.? ? T . (1 )
+ K ?
U U eq
1 1
u T U
( ) = . exp ?? - ?? = U . exp ?? - ?? = U
5-32
sc U max max N
2 1 R C R C K
. (1 )
+
? p 2 ? ? eq c ?
D'où,
eq
T (1 ) . ln max .
? U ? R
= + K ? ? . C
U c 5-33
? U 1 + K
N ? eq
Nous montrons sur les figures 5-15-a et b ces temps en
fonction de la résistance d'équilibrage et pour différents
facteurs de dispersion. Il est bien évident que le temps TU
requis pour atteindre la tension nominale est inférieur à celui
d'équilibrage Teq. Plus le facteur de dispersion de
la capacité est élevé, plus les temps requis
Teq et TU pour atteindre l'équilibrage sont
faibles. Ceci s'explique car avec une forte dispersion sur le facteur
Kc, la capacité correspondante est faible et donc la
constante de temps de charge ou décharge est faible.
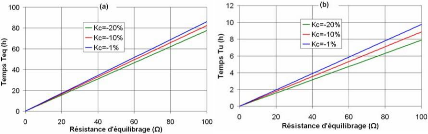
Fig. 5-15 : Temps d'équilibrage en fonction de
la valeur de résistance d'équilibrage
Ces résultats sont obtenus avec comme seule dispersion
sur les paramètres du composant la dispersion sur la capacité.
Dans le cas d'application où le rapport cyclique est
bas, il est préférable de considérer une dispersion sur la
capacité (Kc) et sur la résistance de fuite
(Kf). Les tensions des cellules sont alors exprimées par les
équations 5-34 et 5-35.
? +
t K
. (1 ) ?
eq
u t U
sc 1 ( ) 01 . exp
= ?? - ??
sc 5-34
R C
? eq . ?
?t K K
. (1 + eq f
+ ) ?
u t U
sc 2 ( ) 02 . exp
= ?? ??
sc - 5-35
R C K
. . (1 ) . (1 )
+ + K
? eq C f ?
De la même manière que ci-dessus, nous trouvons les
nouveaux temps d'équilibrage (cf. eq. 5-36 et 5-37).
ln(1 + Kc ) . (1+ K f +
K c Kc .Kf Teq K K K K K K K
K
) .C. R
eq 5-36
+ . + . + eq K c . K
f
.
c + c f eq f eq c

.
? U ?R
max eq
T = + +
(1 K K K K
+ ? ? . C
U c f c f
. ) . ln . 5-37
1
eq
U +K +Kf
La proportionnalité des deux temps
d'équilibrage (sans (Teq1) et avec la dispersion
(Teq2) sur la résistance de fuite) est donnée par
l'équation 5-38. La figure 5-16-a donne cette relation en fonction du
facteur de la dispersion avec Kc=-20%. Elle démontre
que la dispersion de la résistance de fuite (avec la dispersion de la
capacité) ralentit l'équilibrage des tensions.
Ceci peut être obtenu de la même façon pour
le temps d'équilibrage TU (cf. eq. 5-39 et fig. 5- 16-b).
Kc . (1 + K f + K
c + Kc.
)
5-38
K f ) . (1 +K
eq
T eq 2


K c + Kc . K
f + Keq + Keq .
Kc+
.K f
Keq .K c . K f
) . (1 + Kc
T eq 1 (
)
T U 2
)
5-39
eq
1 + K c +Kf.K

c + Kf ) . (1 + K
TU1 1 + K f +Keq
)(1 +Kc )
où,
TU1 et TU2 sont les
temps d'équilibrage respectivement sans et avec la dispersion sur la
résistance de fuite.
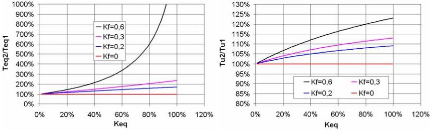
(a) (b)
Fig. 5-16 : C omparaison des temps d'équilibrage
sans et avec la dispersion de résistance de fuite
La dispersion de la résistance de fuite augmente le temps
d'équilibrage et peut donc réduire l'espérance de vie du
composant et du module.
Dans les applications ayant un rapport cyclique
élevé, il est difficile d'équilibrer la tension
instantanée. Nous définissons donc un nouveau temps
d'équilibrage correspondant au temps pour équilibrer les tensions
moyennes.
Nous représentons sur la figure 5-17 le profil du
courant et la réponse en tension d'un module de supercondensateurs
utilisé dans une application avec rapport cyclique élevé.
Pour une période T, le module est chargé à
courant constant I pendant un temps áT/2 et
déchargé pendant le même temps.

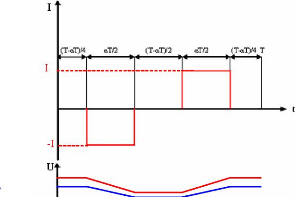
Umax
(1+Kc)Umax
-Usc2
-Usc1
Fig. 5-17 : Profil général du
courant
Nous pouvons déduire le temps d'équilibrage des
tensions moyennes à partir de la définition
de la valeur moyenne. En considérant des valeurs de
capacité fixe (non dépendante de la tension), les tensions
moyennes sans système d'équilibrage peuvent être
écrites par les équations ci-dessous :
1
=
Usc

U sc 2
). C
5-40
á +
T I U
4 . . (1 + K c
max
4 . C
- á + max +
T I U
4 . . (1 c ).
K C
5-41
Kc )
4 . . (1
C +
Les évolutions des tensions moyennes pendant
l'équilibrage sont données par le système
d'équations suivant :
- á
. exp
t
5-42
T I U
+ 4 . max . (1 ).
+ K C
u =
sc 1
-
c
4 . C .
R C
p .
u
2
á T I U
+ 4 . max . (1 + K c
). C
. exp
? t ?
?? - ??
. . (1 )
+
? ?
c p c
5-43
sc 4 . . (1 )
C K
+ R C K
A l'équilibre, les deux tensions moyennes
exprimées ci-dessus sont égales. D'où, nous pouvons
calculer le temps d'équilibrage par l'équation 5-44.
eq 5-44
ln(1 ) . (1 )
+ K + K c c
T = . .
C R
eq K K
c . (1 + eq )
A titre de comparaison, nous constatons que les deux temps
d'équilibrage, celui de la relation 5-31 et de la relation de 5-44 sont
identiques.
Dans le cas où la capacité et la
résistance de fuite du supercondensateur SC2 sont dispersées,
nous trouvons un temps d'équilibrage des tensions moyennes égal
à celui donné par la relation 5-36.
5.4.1.1.3. Résultats de la simulation des
applications
Nous comparons sur la figure 5-18-a et b l'espérance
de vie, le rendement énergétique et le temps d'équilibrage
pour les de ux profils du courant avec un rapport cyclique élevé
(cf. fig. 5- 7 et 5-9). Ces résultats sont calculés par le
logiciel Simplorer (méthode de Monte Carlo) pour Ttot= 1 h et
Kc= -20%. Nous remarquons que les deux profils
énergétiquement identiques
donnent des résultats identiques.
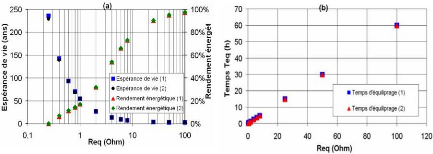
Fig. 5-18 : Comparaison de performance des applications
à rapport cyclique élevé(1) profil de fort
courant de charge/décharge (cf. fig. 5-7), (2) profil du projet THALES
(cf. fig. 5-9)
Nous montrons sur la figure 5-19 l'espérance de vie
vis-à-vis de la dispersion de la capacité Kc
du supercondensateur. Nous remarquons que, quelle que soit la résistance
de fuite, l'espérance de vie est supérieure à celle sans
système d'équilibrage et qu'une résistance
d'équilibrage faible, qui va rapidement supprime les surtensions,
améliore cette espérance de vie.
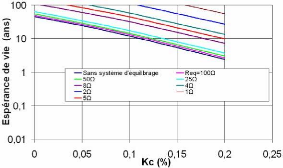
Fig. 5-19 : Espérance de vie en fonction du
facteur de dispersion avec système d'équilibrage
passif
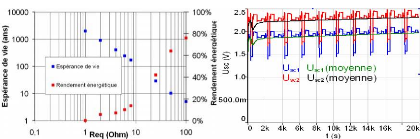
D'après ces résultats pour des applications
à rapport cyclique élevé, nous constatons qu'une
résistance autour de 5 ? donne un résultat
équilibré : une espérance de vie de l'ordre de 10 ans et
un rendement énergétique de l'ordre de 60%. Nous
représentons sur la figure 5-20 la tension aux bornes des
supercondensateurs pour cette valeur de résistance pour l'application
à fort courant (cf. fig. 5-7).
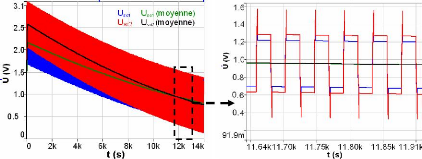
Fig. 5-20 : Tension aux bornes des supercondensateu avec
une résistance d'équilibrage de l'ordre de 5?
rs
Notons que les performances de ce type d'équilibrage
peuvent varier suivant le profil de l' application et que les résultats
présentés sont donnés à titre indicatif.
Nous représentons sur la figure 5-21-a la performance
du système d'équilibrage vis-à-vis de la résistance
d'équilibrage pour une application à rapport cyclique bas (cf.
§ 5.3.1.2). Nous présentons sur la figure 5-21-b le profil de la
tension aux bornes de supercondensateurs résultant des données du
paragraphe 5.3.1.2 et pour une résistance d'équilibrage de 50 ?.
D'après ces résultats, nous constatons qu'une telle valeur de
résistance d'équilibrage de 50 ? est capable de limiter la
tension au-dessous de sa valeur nominale et donne une espérance de vie
et un rendement acceptables (espérance de vie de l'ordre de 10 ans et
rendement de l'ordre de 60%).
(a) (b)
Fig. 5-21 : Résultats de la simulation d'une
application ayant un rapport cyclique bas
Ce type d'équilibrage passif est intéressant
dans les applications ayant un rapport cyclique bas car sont coût est
faible et les résistances d'équilibrage de relativement forte
valeur conviennent [161]. Pour ce type d'application, nous n'étudierons
pas les autres systèmes d'équilibrage plus coûteux
5.4.1.2. Diodes Zener
La deuxième solution consiste à utiliser des
diodes Zener, en remplacement des résistances dans le système
d'équilibrage passif [155]. Celles-ci doivent équilibrer la
tension des supercondensateurs selon leur tension Zener. La figure 5-22
représente le circuit équivalent de ce système, dans
lequel les diodes Zener sont liées en parallèle aux
supercondensateurs. Le mécanisme de cet équilibrage est
lié toujours à une perte d'énergie dans les diodes Zener.
La difficulté majeure de ce système d'équilibrage est
essentiellement de trouver les diodes Zener qui conviennent pour une
application donnée comme les applications présentées
précédemment [154].
D1 D2
Dn
Rf1
Rf2 Rfn
ESRl Cl C2

ESR2 ESRn
Cn

Usc1 Usc2
Uscn

Ucn
Fig. 5-22 : Système d'équilibrage à
diodes Zener
5.4.1.3. Résistances
commandées
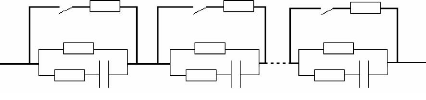
Dans ce système d'équilibrage, un interrupteur
actif est mis en série avec la résistance d'équilibrage.
Ce dispositif est relié en parallèle à chacune des
cellules du supercondensateur (c.f fig.5-23). Lorsque la tension du composant
dépasse une valeur donnée, l'interrupteur est fe é, ce qui
permet à un courant de parcourir la résistance
d'équilibrage (comme dans le cas
rm
de l'équilibrage passif). Ensuite, l'interrupteur est
ouvert lorsque la tension aux bornes de la cellule surveillée revient
à une valeur de référence [56, 162, 153].
S 1 Req1
S2 Req2
Sn Reqn
ESRl ESR2
ESRn
Cl C2
Cn
Rf1 Rf2
Rfn

Usc1 Usc2
Uscn

Umod
Fig. 5-23 : Système d'équilibrage
à résistances commandées
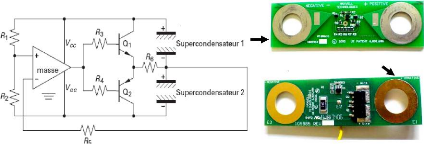
C
e système d'équilibrage se compose d'un
circuit actif principal comprenant un dispositif actif de
commutation tel qu'un transistor bipolaire ou MOSFET associé à la
résistance d'équilibrage, un circuit de
commande, et un autre de détection (cf. fig. 5-24). La commande
de l'interrupteur est choisie de la telle façon qu'un minimum
d'énergie soit dissipée dans les
résistances d'équilibrage. L'interrupteur est
fermé quand la tension du supercondensateur
dépasse une valeur seuil. A titre d'exemple, le transistor
(IRLI3705NPbF ; VDSS= 55 V ; R
DS(on)=0,01? ; ID=52 A) du fabricant International
Rectifier a été choisi dans le système de la
figure 5.24).
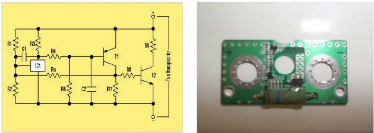
Fig. 5-24 : Schéma de la carte
électronique d'équilibrage et sa photo [162]
5.4.1.3.1. Résultats de la simulation des
applications ayant un rapport cyclique élevé
Nous présentons sur les figures 5-25-a et b les
résultats de la simulation des deux profils du courant à rapport
cyclique élevé (cf. fig. 5-7 et 5-9). Nous remarquons que cette
solution d'équilibrage permet de contrôler l'énergie
dissipée dans les résistances d'équilibrage, ce qui
améliore fortement le rendement énergétique du
système d'équilibrage (ç ? 87%).
Sur les figures 5-25-a et b, la résistance
d'équilibrage Req est limité à 5 ? car
au-delà le temps d'équilibrage (TU) est supérieur
au temps total simulé (Ttot).
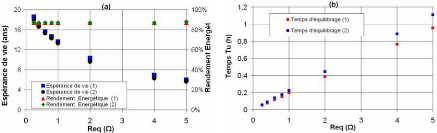
Fig. 5-25 : Comparaison de performanc des applications
à rapport cyclique bas
e
avec les résistances
commandées
L'intérêt de cette solution est de prendre des
valeurs faibles de résistances d'équilibrage pour réaliser
l'équilibrage le plus rapidement possible, car le rendement
énergique ne peut pas descendre au-dessous d'une valeur limite.
Cependant, pour des considérations de puissance dissipée dans
cette résistance, la valeur de cette dernière ne pourra pas
être trop faible.
Une résistance d'équilibrage de l'ordre de 2 ?
peut donc, en plus d'un rendement élevé, assurer une
espérance de vie d'environ 10 ans pour les deux profils, quelque soit la
dispersion de la capacité (cf. fig. 5-25). La figure 5-26 montre la
tension aux bornes des supercondensateurs (SC1 et SC2) avec
un facteur de dispersion (KC) de -20% pour des résistances
commandées de 2 ?.
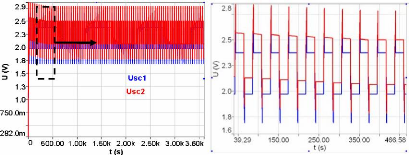
Fig. 5-26 : Tension aux bornes des supercondensateurs
pour résistances commandées de 2 ?
Nous pouvons conclure que le système d'équilibrage
à résistances commandées e st bien adapté aux
applications à rapport cyclique très élevée
[163].
La commande du transistor peut être
réalisée par différentes méthodes. A titre
d'exemple, dans notre exemple, nous fermons l'interrupteur quand la chute de la
tension Uc sur la capacité du supercondensateur
dépasse la valeur nominale limite ; Uc est donc la
tension du supercondensateur moins la chute de tension sur la résistance
ESR . Ceci permet d'améliorer la
performance du système d'équilibrage pour les
applications à rapport cyclique élevé et de réduire
le temps d'équilibrage TU.
La validation expérimentale de l'estimation de la
résistance ESR par un circuit supplémentaire
connecté en parallèle au supercondensateur est envisageable
[164].
5.4.1.3.2. Nouvelle génération de
résistances commandées
Nous pouvons trouver différentes configurations du
circuit d'équilibrage avec résistances commandées. Le
fabricant MAXWELL propose actuellement le circuit d'équilibrage
donné sur la figure 5-27. Ce circuit se place entre deux
supercondensateurs. Pour un nombre de cellules n, il faut n-1
circuits d'équilibrage. Son principe est basé sur la comparaison
entre la tension des deux cellules de supercondensateurs ; le signal à
la sortie du comparateur commande les transistors complémentaires Q1
et Q2 [55]. Il y a deux types de ces circuits selon la valeur
désirée du courant d'équilibrage ; à faible et
à fort courant.
Circuit avec faible
courant
d'équilibrage
Circuit avec fort
courant
d'équilibrage
Fig. 5-27 : Schéma de principe d'un circuit
d'équilibrage à résistance commandée de MAXWELL
[55]
Le transistor Q1 est fermé quand la tension aux
bornes du supercondensateur 1 est supérieure à celle du
supercondensateur 2 et inversement.
La commande de ce type de circuit est très
simplifiée, ce qui impacte le prix de celui-ci. L'av antage principal de
ce système est qu'il permet d'équilibrer les tensions moyennes
assez
r pidement et de stabiliser leur valeur avec le temps. A long
terme cela peut aider à limiter a
l'apparition de la surtension sur le composant critique. La fi
gure 5-28 présente la tension aux bornes des supercondensateurs avec ce
type de commande (KC=-20%).
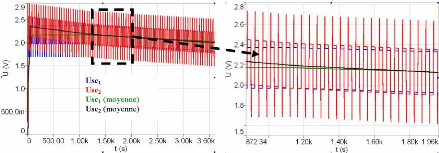
Fig. 5-28 : Tension aux bornes des supercondensateurs
avec une résistance d'équilibrage de 5,5 ?
5.4.1.4. Transistors MOSFET linéaires
Nous pouvons aussi utiliser comme système
d'équilibrage des MOSFET en remplacement du transistor et de la
résistance d'équilibrage des circuits présentés
précédemment. L'énergie de la surtension est alors
dissipée dans la ré sistance interne du transistor. Ce dernier
est commandé dans sa zone linéaire. La tension de commande grille
source Vgs est variable et proportionnelle à
l'inverse de la surtens ion.


