CHAPITRE III
ÉTUDE ÉCONOMETRIQUE
« Un modèle n'est jamais juste, il est juste
utile »
B.F
Introduction :
L'analyse de l'évolution du système
éducatif Algérien du chapitre1 a mis en évidence les
efforts considérables consentis par l'Etat Algérien à
l'éducation. Néanmoins, la revue de littérature empirique
du chapitre 2 montre qu'il y a un débat concernant l'effet de
l'éducation sur la croissance économique.
Le but de cette étude économétrique est
d'étudier les liaisons entre la croissance économique et les
variables éducatives pour le cas de l'Algérie. La première
section rappelle les définitions et les principales
propriétés des processus aléatoires univariés et
multivariés. La seconde section présente les variables
utilisées, et commente les principaux résultas.
SECTION 1 : Processus aléatoires et
représentation VAR.
Nous rappelons tout d'abord en (1.1) les définitions et
les principales propriétés des processus aléatoires
stationnaires et non stationnaires. Puis nous présentons en (1.2) la
modélisation multivariée et la notion de cointégration.
1.1. Généralités sur les processus
aléatoires univariés : 1.1.a. Notions et
Définitions :
1. Processus Aléatoire :
Un processus aléatoire est une suite de variables
aléatoires indexées dans le temps et définies sur un
espace des états de la nature. Ainsi, pour chaque instant du temps, la
valeur de la quantité étudiée Xt est
appelée variable aléatoire et l'ensemble des valeurs
Xt quand t varie est appelé processus
aléatoire
2. Série Chronologique :
En économie, les données constituent souvent des
séries d'observations sur une ou plusieurs variables faites à
différentes dates : les observations ne sont pas
indépendantes.
On appelle série chronologique (ou série
temporelle) toute suite d'observations (Xt, t ? T) indexées
par un ensemble ordonné T (le « temps »).
Types de Séries :
Une série chronologique ou encore chronique est un
ensemble d'observations d'un processus aléatoire (Xt)t?T se
réalisant en un instant spécifié t ? T.
· Série continue: Une série
chronologique est dite continue si l'ensemble des instants d'observations est
continu (non dénombrable).
· Série discrète: Une
série chronologique est dite discrète si l'ensemble des instants
d'observations est discret (dénombrable).
1.1.b. Processus Aléatoire stationnaire
:
1. Stationnarité Stricte et Stationnarité
faible :
Nous commencerons par poser la définition d'un
processus stationnaire au sens strict (ou stationnarité forte) et par
là étudier ensuite les propriétés de la
stationnarité du second ordre (ou stationnarité faible).
Le processus aléatoire (Xt, t ? T) est dit
strictement stationnaire si :
? i=1 ,..., n avec t1 < t2 <...< t
n tel que ti?T et h ? T avec ti+h ? T, les
deux suites (x t 1 ,... , x tn ) et (xt 1+h,..., xtn +h) ont la
même loi de probabilité.
Autrement dit :
? (x1 ,..., xn ), ? (t1,..., tn)
et ? h ? T : P [xt 1 < x1 ..., x tn <xn
] = P [x t 1+h < x 1 ,..., xtn +h <xn ].
Le processus aléatoire (Xt, t? T) serra dit
stationnaire au sens faible, s'il aura une moyenne et
une
variance qui ne changeront pas avec le temps, et si la covariance
entre les valeurs du processus en deux points dans le temps ne va
dépendre que de la distance entre les points dans le temps et non du
temps lui-même. C'est à dire :
1.
2.
3.
|
E (X t ) = ì < 8 +
2
Var (X t ) = ó Cov(X t ,X
t+h)=( h)
|
? t ? T; ? t ? T; ? t, h ? T .
|
En résumé, un processus est stationnaire au second
ordre si l'ensemble de ses moments sont indépendants du temps.
2. Processus Bruit Blanc (White Noise):
Parmi la classe des processus stationnaires, il existe des
processus particuliers que sont les processus bruit blanc (ou White Noise). Ces
processus sont très souvent utilisés en analyse des séries
temporelles, car ils constituent en quelque sorte les »briques
élémentaires» de l'ensemble des processus temporels. Tout
processus stationnaire peut s'écrire comme une somme
pondérée de bruits blancs (théorème de Wold).
Le processus {å t ,t ? Z} est
dit un bruit blanc faible noté ( ) 2
å t~wn(0,ó
å ) si:
3. E(å t )=0,?t? Z.
3. V(å t )=ó
å 2,?t?Z.
ó 2 0.
si h =
å
3. ( )
COV E h
( , ) ( )
å å - å å -
í
= = =
t t h t t h å 0 0.
? ?
h
Le processus { å t , t ? Z}
est dit un bruit blanc fort s'il est indépendant et
identiquement distribué (i.i. d). Si le bruit blanc
(åt) est normalement distribué, on parle de
bruit blanc Gaussien :
å t ~ Í 0, ó å
( 2 )
3. Fonction d'Autocovariance : La fonction
d'autocovariance du processus aléatoire (Xt ,t ? T ) mesure
la covariance pour un couple de
valeurs séparées par un intervalle de longueur
h appelé retard, elle fournit des informations sur la
variabilité de la série et sur les liaisons temporelles qui
existent entre les différentes composantes de la série Xt .
Définition : La fonction d'autocovariance
du processuus {Xt ,t? T } est définie :
í : T * T ? IR
(t , s) ? í (t, s)= Cov (X t, X s)
= E [ (X t - E (X t)) (X s - E (X s )) ] ?
t, s ? T Estimation de la fonction d'autocovariance :
Considérons un ensemble d'observations
X1,... ,Xn. Issues d'un processus
(Xt ,t? Z ) La moyenne empirique est donnée par :
t
1 n
X X
=
n =
1
t
La fonction d'autocovariance empirique est donnée par :
t = 1
n h
-
= - -
( )( )
X X X X
t t h
-
, h +
? ? Z .
í à( )
h
1
n h
-
ñ ? ñ
à
t N 0,1 h
ñ h ( ) ( )
= ? ? ?
h h
V ñ à h


Cet estimateur est biaisé mais il est asymptotiquement
sans biais.
4. La fonction d'autocorrélation (AC):
La fonction d'autocorrélation notée
ñ(h) mesure la corrélation de la série
avec elle-même décalée de
h périodes.
On supposera par la suite que le processus {Xt ,t ? Z
} est stationnaire du second ordre. Définition :
On définit la fonction d'autocorrélation par la
formulation suivante :
ñ(h)= Corr ( Xt , Xt-h) =
í h
( )
= (0)
í
, ?h? Z.
COV X X
( )
t , t h
-
VAR X VAR X
( ) ( )
t t h
-


Cette fonction ñ(h) est à valeurs
dans[-1,+1] .Sa représentation graphique est appelée
corrélogramme. Propriétés: La
fonction d'autocorrélation d'un processus (Xt ) stationnaire
vérifie :
· ñ(0)= 1;
· ñ(h) = ñ(0) ;
· ñ(h) =
ñ(-h) (c'est une fonction paire).
Estimation de la fonction d'autocorrélation :
La fonction d'autocorrélation empirique est donnée
par : ( )
à h
ñ í
h í
à( ) à 0
= ? h ? Z
( )
Cet estimateur est biaisé, mais il est asymptotiquement
sans biais.
D'après le théorème central limite, la
variable centré ñh
t suit une loi normale réduite :
où V (àñh)
désigne l'estimateur de la variance empirique des estimateurs
ñàh:
h - 1
( )
ñ à h
ñ 2
j
n j = -
V
1
=
à
( 1)
h -
En utilisant la symétrie des
ñh , on obtient :
h - 1
V ( )
ñ à h
(1 2 à )
ñ 2
= + j
j 1
1
n
la statistique de Student associée au test H0:
ñh = 0, est donnée par :
?Z
ñ à
t N 0,1 h

ñ h ( ) ( )
= ? ?
h
V ñ à h
au seuil
|
á= 5%, si
|
tñàh
|
= 1.96, on rejette l'hypothèse H0, c'est à dire
la nullité de ñh.
|
|
|
|
|
|
5. Fonction d'Autocorrélation Partielle (PAC)
:
Définition :
La fonction d'autocorrélation partielle de retard
h notée ø(h) , mesure la corrélation entre X
t et Xt - h
une fois retirée l'influence des variables
antérieures àX t - h.
R h
ø = ? ?Z
( ) , .
h h
R h
( )
* ( )
La fonction d'autocorrélation partielle est donné
par :
La représentation graphique de cette fonction est
appelée corrélogramme partiel. avec :
1 (1) ( 2) ( 1)
ñ ñ ñ
h h
- -
ñ(1) 1( 2)
? ? ñ h -
=
R h
( )
? ? ?
ñ ( 2) 1 (1)
h - ? ? ñ
ñ ñ ñ
( 1) ( 2) (1) 1
h h
- -
et on introduit de façon analogue la matrice R *
( h ) obtenue en remplaçant la dernière colonne de R
( h ) par le vecteur [ ]'
ñ (1), , ñ ( h ) .
1 (1) ( 2) 1
ñ ñ h -
ñ ( )
1 1 ? ? ñ ( )
1
R h
*( ) = ? ? ñ (1)
ñ ( )
h - 2 1 ( 1)
? ? ñ h -
ñ ñ ñ ñ
( 1) ( 2) (1) ( )
h h
- - h
Estimation de la Fonction d'Autocorrélation:
-Un estimateur naturel øà h de
l'autocorrélation partielle øh du processus
(Xt, t ?Z) consiste en l'estimateur des MCO du dernier
paramètre de la régression :
X + c ø X ø X ø h
X t h å t h
t à à t à t
à 1 à ,
1 1 2 1
= + + + + - + + ? ?Z
-

-On peut également utiliser la relation : à ( ) ( )
( )
ø = R h R h h
h à * à , ? ? Z
6. Les Opérateurs Linéaires :
Opérateurs de Retard et d'Avance:
On considère le processus stochastique (aléatoire)
stationnaire {Xt ,t ? Z } .
Définitions :
· On appelle opérateur retard L (L
=lag, ou B =backward) l'opérateur linéaire
défini par
L : X t ? L (Xt) = LX t = X t-1
· On appelle et opérateur avance F
(F =forward) l'opérateur linéaire défini par
F : X t ? F (Xt) = FX t = X t+1
Propriétés :
1. L2 = L o L, et plus généralement, L
j = LoLo~~~~~~~ oL,j ? N.
j fois
2. L j X t = X t-j, ? j ? Z , en
particulier on a 0 L X t = X t .
3. Si X = C, ? t ? a v ec C ? R , L X t = L C = C , j .
Z ? ?
j j Z
t
4. i j i+ j
L(LX t )= L X t = X t-i-j , ? ( i, j) ? Z
.
2
5. L o F = F o L = I (opérateur identité) et on
note -1
F = L et -1
L = F .
6. -j j
L = F pour j? N.
Opérateur de Différence :
On considère le processus stochastique {Xt ,t ?
Z } non stationnaire, pour le rendre stationnaire on utilise des
opérateurs de différentiation et de désaisonnalisation.
1. ÄX t = (1 - L) X t = X t - X
t-1 , opérateur de différentiation (première
différence).
2. j j
Ä X t = (1 - L) X t pour tout j N,
? opérateur de différentiation.
Ä S Xt = (1 - L ) X t = X t -
X t-s, opérateur de désaisonnalisation.
7. Processus MA et AR :
Processus MA :
Le processus (Xt, t ? Z) satisfait une
représentation MA d'ordre q, notée MA(q), si et seulement si :
q
è L j
= j
.
X = m+ È (L) å t
t
avec E (Xt) = m ,le polynôme È (L)
étant défini par : ( )
È L
j 0
où ?jq,è j
?R,è0=1 *
et è q ?R avec ( )
å t i . i . d
0, ó å .
2
Processus AR :
Le processus (Xt, t ? Z) satisfait une
représentation AR d'ordre P, notée AR(p), si et seulement si :
Ö (L)X t = m+ å t
p
|
avec E (Xt) = m. et c? R ,le polynôme
étant défini par : ( )
Ö L
|
= èL
j
|
j
|
j 0
où ?jp,è j
?R,è0=1 *
et è p ? R , avec ( )
å t i . i . d
0, ó å .
2
1.1.b. Processus Aléatoires non stationnaires
:
La plupart des séries économiques sont non
stationnaires, c'est -à- dire que le processus qui les décrit ne
vérifie pas au moins une des conditions de la définition d'un
processus stationnaire du second ordre. Le fait qu'un processus soit
stationnaire ou non conditionne le choix de la modélisation que l'on
doit adopter. Par exemple, si l'on s'en tient notamment à la
méthodologie de Box et Jenkins, et si la série
étudiée est issue d'un processus stationnaire, on cherche alors
le meilleur modèle parmi la classe des processus stationnaires pour la
représenter, puis on estime ce modèle. En revanche, si la
série est issue d'un processus non stationnaire, on doit avant toutes
choses, chercher à la »stationnariser», c'est à dire
à trouver une transformation stationnaire de ce processus. Puis, on
modélise et on estime les paramètres associés à la
composante stationnaire.
Pour détecter la non stationnarité, on utilise en
premier lieu la méthode graphique pour avoir une idée
sur le type de non stationnarité, et par suite on utilise la
méthode analytique.
Méthode graphique :
Analyse du graphe de la série :
· Si le modèle est avec rupture, la série
présente une rupture de moyenne à partir d'une certaine date.
· Si la moyenne du processus qui génère la
série évolue avec le temps, la non stationnarité est de
type déterministe.
· L'étude des graphes représentant
l'évolution de la moyenne, ainsi que celui de la variance peut aider
à détecter une éventuelle non stationnarité.
Analyse du corrélogramme :
· L'étude du corrélogramme, nous permet de
détecter une non stationnarité.
· La décroissance de manière non
exponentielle de la fonction d'autocorrélation, nous indique une non
stationnarité de la série. (le corrélogramme d'un
processus stationnaire présente une décroissance
«rapide»)
Toutefois, si ces représentations graphiques peuvent
(dans certains cas) nous indiquer qu'une série est non stationnaire,
elles ne nous permettent pas de déterminer le type de non
stationnarité c'est pourquoi il faut recourir par la suite à la
méthode analytique.
Il existe différentes sources de non
stationnarité et à chaque origine de la non stationnarité
est associée une méthode propre de stationnarisation. Selon la
terminologie de Nelson et Plosser (1982) il y'a deux classes de processus non
stationnaires : les processus TS (Trend Stationary) et les processus DS
(Differency Stationary).
1. Processus TS :
Cette forme de non stationnarité provient de la
présence d'une composante déterministe tendancielle.
Définition: (Xt, t? Z) est un processus TS
s'il peut s'écrire sous la forme X t = f (t) +z t
où f (t) est une fonction du temps et z
t est un processus stochastique stationnaire.
le processus X t s'écrit comme la
somme d'une fonction déterministe du temps et d'une composante
stochastique stationnaire. Ce processus ne satisfait plus la
définition de la stationnarité du second ordre. On a en effet
:
E (Xt) = f (t) + E(z t )
Une des propriétés importantes de ce type de
processus réside dans l'influence des innovations
stochastiqueså t . Lorsque un processus TS est
affecté par un choc stochastique, l'effet de ce choc tend à
disparaître au fur et à mesure que le temps passe :
C'est la propriété de non persistance des chocs.
Pour stationnariser un processus TS, il convient de retirer la
composante déterministe f(t) en régressant la
série X t sur la plan défini par les puissances de
t.
2. Processus DS: Cette forme de non
stationnarité est de nature stochastique.
Définition:
Un processus non stationnaire (Xt, t? Z) est un
processus DS (Differency Stationnary) d'ordre d, où
d
désigne l'ordre d'intégration, si le processus
filtré défini par d
(1 - L) X t est stationnaire. On dit aussi
que (Xt, t ?Z) est un processus
intégré d'ordre d, noté I (d).
- Ainsi, on peut définir une classe de processus
stochastiques qui ne satisferont pas les conditions de la stationnarité,
mais dont la différence à l'ordre d satisfait elle les
propriétés de la stationnarité.
-la définition des processus DS repose sur la
présence de racines unitaires dans le polynôme associé
à la dynamique autorégressive du processus.
Dans la classe générale des processus DS, un type
de processus apparaît de façon régulière, si bien
que l'on lui a attribué un nom particulier : la marche
aléatoire.
Définition : Une marche aléatoire
(Random Walk), ou martingale, est un processus AR(1) intégré
d'ordre un, noté I (1) :
ÄX t = (1 - L) X t = c + å t ? X t = c + X
t-1 + å t
où å t est un bruit blanc
i.i.d. ( )
0, óå . Si c = 0, on parle
d'une marche aléatoire pure (Pure Random
2
Walk).
Pour stationnariser un processus DS d'ordre d, il convient
d'appliquer le filtre d
(1 - L) .
Propriétés des processus DS :
1. Un processus non stationnaire (Xt, t? Z) est un
processus DS intégré d'ordre d, noté I
(d), si
le polynôme ö (L) défini en
l'opérateur retard L, associé à sa composante
autorégressive admet
d racines unitaires :
ö(L) X t = Z t avec ö
(L) = (1 - L) ö? (L)
d
|
|
|
où Zt est un processus stationnaire, et si les
racines du polynôme ö (L)
|
sont toutes strictement
|
supérieures à l'unité en module.
2. L'influence d'une innovation å t
à une date T sur un processus I (d) : d
(1 - L) X t = è (L) å t
est permanente. On a ainsi une propriété de
persistance des chocs.
Conséquences d'une mauvaise stationnarisation du
processus :
· La différenciation d'un processus TS
conduit à une autocorrélation fallacieuse du résidu
du filtre.
· L'extraction d'une tendance linéaire d'un
processus DS conduit à créer artificiellement une forte
autocorrélation des résidus aux premiers retards.
3. Tests de Racine Unitaire:
Ces tests permettent, tout d'abord de vérifier que les
séries sont non stationnaires, et d'autre part de discriminer entre les
processus DS et TS.
Le Test de Dickey Fuller simple (DF) :
Le test de Dickey Fuller simple (1979) est un test de racine
unitaire (ou de non stationnarité) dont l'hypothèse nulle est la
non stationnarité d'un processus autorégressif d'ordre un.
Considérons un processus (Xt, t ?Z) satisfaisant la
représentation AR(1) suivante :
X t = ñ X t-1 + å t
avec ( 2 )
å ti . i . d 0,
ó å ,et ñ ?R .
Le principe général du test de Dickey Fuller
consiste à tester l'hypothèse nulle de la présence d'une
racine unitaire :
H : = 1
ñ
0
H : || < 1
ñ
1
La distribution asymptotique de
l'estimateurñà obtenue sous H0 est non
standard (non normale), et en particulier non symétrique.
La distribution asymptotique, sous H0, de la
statistique de Student t ñ à = 1 du test de
Dickey-Fuller n'est
pas standard. On a :
1
N
ñ à 1
= 2
=
= - = -
( ) ( )
ñ ñ
t
à 1 à 1 t
ó S
ñ
à N
N N
et 2 = = -
( ) ( ) ( )2
1 1
å ñ -
2
S à à
N X X 1
- -
1 1
t t t
N N
t = 1 t = 1
Sous l'hypothèse H0 de non
stationnarité, la distribution asymptotique de la statistique de Student
t ñ à = 1 diffère suivant que le modèle
utilisé soit sans constante, ou avec constatnte, ou bien avec constate
et trend.
Le test de l'hypothèse ñ = 1 est
identique au test de l'hypothèse ö = 0 dans le
modèle transformé suivant:
ÄX t = öX t-1 +
å t
Avec ö = ñ-1 et t
Ä X = (1 - L)X t = X
t - X t -1, et le test de Dickey-Fuller se
ramène alors à : H : = 0
ö
0
H : < 0
ö
1
La statistique à = 0
t ö a la même distribution
asymptotique quet ñ à = 1, et il faux
utiliser les seuils critiques tabulés par Dicke-Fuller (1979) ou Mc
Kinnon (1981) pour effectuer les test de non stationnarité.
Stratégie du Tests:
Une stratégie de tests de Dickey Fuller permet de tester
la non stationnarité conditionnellement à la spécification
du modèle utilisé. On considère trois modèles
définis comme suit :
Ä X t = öXt-1 +
åt modèle 1;
Ä X t = ö X t-1 + c +
å t modèle 2;
ÄX t = öX t-1+ c +
â t + å t modèle 3.
Déroulent de la stratégie du test DF :
On commence par tester la racine unitaire à partir du
modèle 3.Si la réalisation de à = 0
t ö est
supérieure au seuil 3
Cá tabulé par Dickey et
Fuller, pour le modèle 3, on accepte l'hypothèse
nulle de
nonstationnarité. Par la suite on cherche à
vérifier si la spécification du modèle 3,
était une spécification compatible avec les données. On
teste alors la nullité du coefficient â de la tendance. Deux cas
sont envisageables:
· Soit on a rejeté au préalable
l'hypothèse de racine unitaire, dans ce cas on teste la nullité
de â par un test de Student avec des seuils standards (test
symétrique, donc seuil de 1.96 à 5%), si l'on rejette
l'hypothèse â = 0, cela signifie que le modèle
3 est le »bon» modèle pour tester la racine
unitaire, la série est TS. En revanche, si l'on accepte
l'hypothèse â = 0, on doit refaire le test de racine
unitaire à partir du modèle 2.
· Soit, on avait au préalable, accepté
l'hypothèse de racine unitaire, et dans ce cas, on doit construire un
test de Fischer de l'hypothèse jointeö = 0 et
â = 0.
On teste ainsi la nullité de la tendance,
conditionnellement à la présence d'une racine unitaire: H : (c;
â; ö) = (c; 0; 0) contre H 1
3 3
0
La statistique de ce test se construit par la relation :
2
F 3 =
( )
SCR C SCR
-
3, 3
3
SCR

( )
N K
-
SCR3 ,C : somme des carrés des
résidus du modèle 3 contraint sous 3
H0 (ÄX t = c + å t
).
SCR3 : somme des carrés des résidus du
modèle 3 non contraint.
N : nombre d'observations.
K : nombre de coefficients à estimer.
y' Si la réalisation de F3 est
supérieure à la valeur ö3 lue dans la
table à un seuil á %, on rejette l'hypothèse 3
H0 .Dans ce cas, le modèle 3
est le »bon», et la sérieX t est
intégrée d'ordre 1
(I(1)+T+c).
y' Si on accepte 3
H0 , le coefficient de la tendance est
significativement nul, conditionnellement à la présence d'une
racine unité, le modèle 3 n'est pas le
»bon» modèle, on doit effectuer à nouveau le test de
non stationnarité dans le modèle 2.
Si l'on a accepté la nullité du coefficient
â de la tendance, on doit alors effectuer à nouveau les tests de
non stationnarité à partir cette fois-ci du modèle
2. Si la réalisation de à = 0
t ö est supérieure au seuil
2
Cá tabulé par Dickey et
Fuller, pour le modèle 2, on accepte l'hypothèse
nulle de non stationnarité. Par la suite on cherche à
vérifier si la spécification du modèle 2,
était une spécification compatible avec les données. On
teste alors la nullité du coefficient C de la constante. Deux cas sont
envisageables:
· Soit on a rejeté au préalable
l'hypothèse de racine unitaire, dans ce cas on teste la nullité
de C par un test de Student avec des seuils standards (test
symétrique, donc seuil de 1.96 à 5%). Si l'on rejette
l'hypothèse C = 0, cela signifie que le modèle 2
est le »bon» modèle pour tester la racine unitaire.
La série est stationnaire. En revanche, si l'on accepte
l'hypothèse C = 0. On doit refaire le test de racine unitaire
à partir du modèle 1.
· Soit, on avait au préalable, accepté
l'hypothèse de racine unitaire, et dans ce cas, on doit construire un
test de Fischer de l'hypothèse jointeö = 0 et C = 0.
On teste ainsi la nullité de la constante,
conditionnellement à la présence d'une racine unitaire:
H : (c; ö ) = (c;0) contre H 1
2 2
0
La statistique de ce test se construit par la relation :
( )
SCR C SCR
-
2, 2
( )
N K
-
F2 =
2
SCR

SCR2,C : somme des carrés des
résidus du modèle 2 contraint sous 2
H0 (ÄX t = å t ).
SCR2 : somme des carrés des résidus du
modèle 2 non contraint.
N : nombre d'observations.
K : nombre de coefficients à estimer.
y' Si la réalisation de F2 est
supérieure à la valeur ö2 lue dans la
table à un seuil á%, on rejette l'hypothèse
2
H0 . Dans ce cas, le modèle 2
est le »bon» modèle et la série X t est
intégrée d'ordre 1 (I(1)+C).
y' Si on accepte 2
H0 , le coefficient de la constante est nul, le
modèle 2 n'est pas le »bon» modèle, on
doit donc effectuer à nouveau le test de non stationnarité dans
le modèle.
Si l'on a accepté la nullité du coefficient C
de la constante, on doit alors effectuer à nouveau les tests de non
stationnarité à partir cette fois-ci du modèle
1.
y' Si la réalisation de à = 0
t ö est supérieure au seuil
1
Cá tabulé par Dickey et
Fuller, pour le modèle 1, on accepte l'hypothèse
nulle de non stationnarité, la série est intégrée
d'ordre1 I (1). (pure marche aléatoire).
y' Si la réalisation de à = 0
t ö est inférieure au seuil
1
Cá tabulé par Dickey et
Fuller, pour le modèle 1,
on refuse l'hypothèse nulle de non stationnarité,
la série est stationnaire I (0).
Le Test de Dickey Fuller Augmenté (ADF):
Il est nécessaire de tester la non
stationnarité de la série en prenant en compte
l'autocorrélation des perturbationsåt . C'est
précisément l'objet des tests de Dickey Fuller Augmentés
(ou ADF). Les trois modèles utilisés pour développer le
test ADF sont les suivants :
p
Ä = +
X Ä + modèle1;
t 1
ö X - î X - å t j t j
t
j 1
p
Ä = +
X Ä + + modèle2;
t 1
ö X - î X - c å t j t j
t
j 1
p
Ä = +
X Ä + + + modèle3.
t 1
ö X - î X c â t å
t j t j t
-
Déroulent de la stratégie du test ADF :
· Déterminer le nombre de retard p
nécessaire pour blanchir les résidus.
· Appliquer la stratégie du test de Dickey Fuller
Simple aux modèles, 1,2 et
3. Les distributions asymptotiques des statistiques de test
töà obtenues dans ces trois modèles sont
identiques à celles
obtenues dans les modèles de Dickey Fuller Simple
correspondants. 4. Choix du nombre de retards optimal :
Critères d'information :
Pour un modèle avec p retard, ayant comme somme
des carrées des résidusSCR P obtenu avec
N
observations.
Le critère d'Akaike, ou AIC, est défini par :
AIC p N N
( ) 2
= log SCR P P
+
Le critère de Schwarz, ou SC, est défini par:
SC p N N
( ) log
= log SCR P P N
+
On retient comme p celui qui minimise ces deux
critères. Principe de parcimonie:
Lorsque l`on désir modéliser une série
chronologique, par un processus stochastique, on doit chercher à
minimiser le nombre de paramètres requis, tout en expliquant le mieux
possible le comportement de la série.
5. Estimation des paramètres: Une fois
le nombre de retards optimal déterminé, on estime les
paramètres du modèle retenu par la
méthode des moindres carrée.
Test concernant les paramètres :
Une fois les paramètres estimés, il faut
vérifier que les paramètres estimés sont bien

significativement différents de zéro. Pour cela on
utilise : Le test de Student : t obs = bjóà
bj
bj: fi' Coefficient du
modèle.
erb : écart type du fi'
Coefficient du modèle.
j
Si la statistique tobs est supérieure à
1.96(quantile d'ordre (1- á) de la loi normale),le coefficient est
approximativement significatif au niveau de risque de 5%.
6. Analyse du résidu : Pour un ordre
h Le test de Box-Pierce permet d'identifier les processus
bruit blanc .le test s'écrit :
H0 : ñ1 =
ñ2 = ñ3 = =
ñh = 0 Contre H1 : ?j ? [1,
h]tq : ñh = 0
Pour effectuer ce test, on utilise la statistique de Box et
Pierce (1970) Q, donnée par:
h
Qh =NE 7,2
k'k
k 1
- N : nombre d'observation.
- h : pris généralement égal à
N/4.
- ñàh :
autocorrélation empirique d'ordre h.
Asymptotiquement, sous H0 , Qh suit un
2
÷ à h degrés de
liberté. Nous rejetons l'hypothèse de bruit blanc au seuil h si Q
est supérieure au quantile d'ordre (1-á) de la loi du
2,2 à h degrés de
liberté.
Une statistique ayant de meilleures propriétés
asymptotiques peut être utilisée celle de Ljung -Box:
2
Q' h=N (N +2)Y
ñk
-K
Asymptotiquement, sous H0, Q'h
suit un 2÷ à h degrés de
liberté. Nous rejetons l'hypothèse de bruit blanc au seuil h si Q
est supérieure au quantile d'ordre (1-á) de la loi du
2,2 à h degrés de
liberté.

h
1.2. Modélisation Multivariée et
Cointégration:
Un modèle VAR(vector autoregressive) est un outil
économétrique particulièrement adapté pour mesurer
et utiliser en simulation, l'ensemble des liaisons dynamiques à
l'intérieur d'un groupe de variables donnés. Toutes les variables
sont initialement considérées comme étant potentiellement
endogènes. C'est-à-dire chaque variable est expliquée par
chacune des autres variables, et par sa propre évolution, mais est
simultanément variable explicative d'une ou de plusieurs autre variables
du modèle.
En règle général, la modélisation VAR
consiste à modéliser un vecteur de variables stationnaires
à partir de sa propre histoire et chaque variable et donc
expliquée par le passé des autres variables.
1.2.a. Modélisation VAR :
1. Représentation générale d'un
modèle VAR:
Définition:
Un processus vectoriel {Xt , t ? Z}, de dimension (k,
1) , admet une représentation VAR d'ordre p,
notée VAR(p) si :
X = c + Ö X + Ö X + + Ö p X
t-p + åt
t 1 t-1 2 t-2
ou de façon équivalente :
Ö (L)X t = c + å t
P
où c de dimension (k, 1) désigne un vecteur de
constantes,( ) 2
Ö L = I ? Ö L ? Ö L
- ??? ? Ö P L n 1 2
où les matrice Ö i ,i
? [0,p] de dimension (k, k), satisferont Ö 0 =
Ik etÖ P ?0k
.Le vecteur (k,1) des
Ö Ö Ö
i i i
? ?
innovations åt est i.i.d.
(0k, Ù ) où Ù est une matrice (k, k)
symétrique définie positive. On pose les définitions
suivantes:
1,1 1,2 1, k
t
x1,
x 2, t
?
Xt
åt
x k t
,
1 ,
å t Ö Ö Ö
i i i
? ?
2,1 2,2 2, k
å 2, t
? Ö = ? ? ? ?
Ö ? ?
i . 1,
i p
[ ]
i j , f
å k t
, Ö Ö Ö
i i i
? ?
k k
,1 ,2 k k
,
? ? ? ? ?
Le processus vectoriel des innovations { å
t , t ?Z } est i. i.d. (0k , Ù ) ,
et satisfait par conséquent les propriétés suivantes :
Ù =
E, ( )
å å - = t t j
j 0
0 0
j ?
E ( å t ) = 0 et
Conditions de stationnarité :
La définition de la stationnarité d'ordre deux (ou
stationnarité du second ordre) est identique à celle du cas des
processus univariés.
Définition:
Un processus vectoriel {Xt , t ? Z}, de dimension (k,
1) , est dit stationnaire au second ordre, ou
stationnaire au sens faible, si:
1. E(X t
)=m,?t?Z.
2. V(X t ) 8 ,?t?Z.
3. ( ) ( )( ) ( ) 2
COV X t X t + h E X t m X t h
m ( h ), t , h .
, = - + - = ? ? Z
Propositions:
1.Un processus vectoriel {Xt , t ? Z}, de dimension
(k, 1) , est stationnaire si et seulement si les racines
du déterminant du polynôme
matricielÖ(L), notéeë i i? [1,
k], sont toutes supérieures à l'unité en
module.
2.Un processus vectoriel {Xt , t ? Z}, de dimension
(k, 1) , est stationnaire si et seulement si les valeurs
propres de l'application linéaire Ö (L),
notéesë ? i,i ? [1, k], sont toutes
inférieures à l'unité en module.
3. Tout processus {Xt , t ? Z}, de dimension (k, 1),
stationnaire, satisfaisant une représentation VAR(p), admet une
représentation moyenne mobile VMA (8) définie par :
8
X = + = + Ø ( )
t i t i
ì ø å ì L å
- t
i = 0
8
avec -1
ì = E (X t ) = Ö (1) c.
|
Le polynôme matriciel ( )
Ø L
|
=øL
i
|
i
|
satisfait la relation de récurrence suivante :
|
i = 0
ø 0 = Ik
ø ø - ø - p ø
S p s
S 1 S 1 2 S 2 , 1
= Ö + Ö + ??? + Ö - ? = avec
øS =0 ?S0 .
2. Estimation d'un modèle VAR:
Les paramètres du modèle VAR ne peuvent
être estimés que sur des séries chronologiques
stationnaires. Le modèle peut être estimé en appliquant la
méthode des moindres carrés ordinaires(MCO), sur chaque
équation séparément, ou on peut appliquer également
la méthode du maximum de vraisemblance.
Le nombre de paramètres à estimer pour un
modelé VAR avec k variables et p décalages est
égale à pk ou 2
2 pk+ k en prenant les termes constants
contenus dans le vecteur C.
Soit le modèle VAR(p) estimé :
X = à c + Ö à X + Ö à X + +
Ö à X + et
t 1 t-1 2 t-2 p t-p
et : vecteur des résidus d'estimation
de dimension (k,1) , ( )
e t = e 1, t , e 2, t
, , e k , t .
3. Détermination du nombre de retards
p:
On peut déterminer le nombre de décalage p
en utilisant les critères d'information. En pratique, il suffit de
déterminer "à priori" un nombre de décalage maximal
pMax et d'estimer successivement les
modèles VAR(p) pourp = 1,
,pMax .pour chaque modèle estimé la valeur du
critère d'information est
calculée. Et le retard p retenu est celui qui
minimise ce critère pour p = 1, , p Max
.
Le critère d'Akaike, ou AIC, est défini par :
AIC p N
( ) ( ) 2
2
= Ù +
log à K P
Le critère de Schwarz, ou SC, est défini par:
( ) ( ) 2 log
N
= Ù +
log à K P N
SC p
Ùà: matrice de variance covariance des
résidus estimés du modèle, K : nombre de
variables du modèle,
N : nombre d'observations.
4. Dynamique d'un modèle VAR:
Les modèles VAR permettent d'analyser les effets de la
politique économique, cela à travers de l'analyse de chocs
aléatoires (innovations) et de la décomposition de la variance de
l'erreur. Cependant, cette analyse s'effectue, en supposant
l'invariabilité de l'environnement économique.
Analyse des chocs :
On considère un processus {Xt , t ? Z}, avec
'
X t = (x1, t , ... , x k, t ) satisfaisant une
représentation VAR (p). On suppose que les innovations { å
t , t ?Z} sont i.i.d. (0k, Ù ) .et
que l'on dispose de T + p réalisations de ce processus, on suppose en
outre que les paramètres Ù , Ö i sont connus,
mais la même analyse peut être menée lorsque l'on ne dispose
que d'estimateurs convergents de ces paramètres.
Idée Générale: Une
fonction de réponse aux innovations résume l'information
concernant l'évolution d'une composante xi , t qui intervient
suite à une impulsion sur xj , t à la date T, en supposant que
toutes les autres variables sont constantes pour t = T.
Pour expliciter les choses, on considère le VAR(1) suivant
:
x
x c x x
Ö + Ö
1
t t t t
= + + å
- -
, 1 1,1 1, 1 1,2 2, 1 1,
= + Ö + Ö +
c x x å
2, 2 2,1 1, 1 2,2 2, 1 2,
t t t t
- -
Avec ( )'
X t = x 1,t , x 2,t et( )'
å t = å 1, t , å
2 , t .
|
On suppose que les chocs å 1 , t et
å 2 , t sont corrélés, avec : ( )
E t t
å å '
|
ó ó
2
1 12
= = Ù
ó ó 2
12 2
|
On cherche à identifier l'impact d'un choc sur x2 , T
à la date T sur la dynamique de la variable x 1,t aux
périodes postérieures à T, en supposant les
évolutions de ces deux variables pour t = T connues et
données.
On cherche donc à déterminer la variation de
x1,t engendrée par ce choc. Pour cela,
considérons la décomposition suivante :
8
x i t
= +
ì ø å
1 ,t 1 1 ,
i =0
Où ø1,i désigne la
première ligne de la matrice Ø i issue de la
représentation VMA( 8).
En raison de la corrélation des deux chocs, l'impulsion
initiale sur å 2,T influence l'innovation å
1,T qui entre elle aussi dans la représentation moyenne
mobile infinie de x 1 , t . Or ,Ce qui est intéressant sur le plan
économique, c'est d'isoler l'innovation »propre» au processus
x 2 ,t . non »polluée» par la réaction de l'innovation
x 1 , t . C'est pourquoi, il convient dans le cas
général où Ù ? IK d'orthogonaliser
les innovations.
On considère donc la décomposition suivante de la
matrice de covariance des innovations:( )'
Ù = P P
-1 -1
où 1
P- est une matrice (k, k) triangulaire inférieure.
Dans notre exemple:
ó12
2 1 1
ó ó
0
ó ó ó
1 12 1 -1
Ù= = 2
ó ó ó
2 2
ó ó = P
12 12 2
ó
12 2 2 2
-
ó ó ó
2 12
0 -
1 1 2 2
ó 1
On pose : -1
í t = På t (ce qui
garanti que ces innovations ne sont pas corrélées).
Si on pose å t = Aí t
la représentation VMA (8) peut se réécrire en fonction des
innovations ít non corrélées. De
façon équivalente, on peut réécrire le V AR en
fonction des innovations orthogonales :
x 1, t = c1 +Ö
1,1 x 1, t - 1 + Ö 1,2 x
2,t-1 + ó 1 í
1 , t
ó ó 2
x c x x t
t = + Ö t - + Ö t - + t
+ -
12 2 12
í ó í
( )
2, 2 2,1 1, 1 2,2 2, 1 1, 2 2 2,
ó ó
1 1
Cette phase d'orthogonalisation implique toutefois que l'ordre
dans lequel sont disposées les variables du VAR affecte l'analyse
dynamique et en particulier l'analyse des fonctions de réponse.
Les fonctions de réponses sont souvent
représentées sous la forme d'un tracé permettant de
visualiser simplement les effets instantanées et dynamiques
associées aux chocs d'innovations sur les variables du vecteurX
t .
Décomposition de la variance:
Définition: Partant de la
décomposition des résidus en innovations »pures» ou
orthogonales, on peut calculer quelle est la contribution de chaque innovation
à la variance totale de l'erreur de prévisions du processus x
i,t . C'est ce que l'on appelle la décomposition de la
variance.
On considère un processus {Xt , t ? Z}, avec
'
X t = (x1, t , ..., x k, t ) satisfaisant une
représentation VAR (p). On suppose que les innovations { å
t , t ?Z} sont i. i.d. (0k, Ù ) . On
suppose que ce processus est stationnaire et peut être
représenté sous la forme d'un VMA(8) :
8
X ø å L å
= = Ø
t i t i t
( )
-
i=0
L'erreur de prévision à l'horizon h s'écrit
:
X - à X = X - E (X /X ,X , . . . ,X )
T+h T+h T+h T+h T T-1 1
= XT+h - E (XT+h/ å
T, å T-1, ..., å
1 )
.
h - 1
= ø å
i T h i
+ -
i = 0
La matrice de variance covariance de l'erreur de prévision
est donc :
( ) ( ) 1
h -
' ø ø '
E X - X à X - X à = Ù + Ù .
T+h T+h T+h T+h i i
i = 1
|
En considérant :
í t = På t å t
í t
1
? = P -
|
où la matrice 1
P- est issue de l'orthogonalisation de ~ : ( )'
Ù = P P .
-1 -1
|
On suppose que ?t ? Z:
å í
1, t 1, t
å í
2, 2,
å = =
t t
t 1 2
( ) ? Où ai désigne la
ième colonne de la matrice 1
P- ? i ? [ 1,k ] . Dès
a a a
? k
?
å í
k t
, k t
,
lors:
Ù = E ( å t å
t ) = a1a 1 V (v1,t ) + a2a 2
V (v2,t )+ +aka k V (vk,t).
' ' ' '
En substituant cette expression dans la variance de la
prévision pour un horizon h, cela donc permet de réexprimer cette
variance en fonction de la variance des innovations »orthogonales»
:
k h - 1
'
EX - X à X - X à
( ) ( ) ( ) ( )
V í ø a a ø
' '
=
T +h T +h T + h T +h j t i j j i
,
j = =
1 1
i
A partir de cette formule, on est en mesure de calculer la
contribution d'une innovation pure íj ,t à la
variance totale de la prévision à un horizon h :
V í ø a a ø + ø a a
ø + + ø k a j a j
ø k
( ) { ( ) ( ) ( )
' ' ' ' ' ' }
j , t 1 j j 1 2 j j 2
La Causalité:
Une des questions que l'on peut se poser à partir d'un
VAR, est de savoir s'il existe une relation de causalité entre les
différentes variables du système.
Causalité au sens de Granger:
Définition :
On dit que la variable x cause au sens de Granger la variable y
si et seulement si la connaissance du passé de x améliore la
prévision de y à tout horizon.
Considérant le VAR(p) suivant avec k=2 avec x
t et y t stationnaires :
x x
c x x
1 1 2 2 Ö Ö
p p å
t t p
1 1,1 1,2 1,1 1,2 2
Ö Ö t - -
Ö Ö
1 t - 1,1 1,2 t
= + + + ????? + +
y y
1 1 2 2 Ö Ö
p p
t t p
c y y
2 2,1 2, 2 2,1 2,2 2
Ö Ö í
t - -
Ö Ö
1 t - 2,1 2,2 t
Un test d'hypothèses jointes permet de conclure sur le
sens de la causalité. Ainsi, x t cause y t au sens
de Granger si l'hypothèse nulle définie ci-dessous peut
être rejetée au profit de l'hypothèse alternative:
De façon analogue, y t cause x t au
sens de Granger si l'hypothèse nulle définie ci-dessous
peut être rejetée au profit de l'hypothèse alternative :
H 0 : 1,2 1,2 p 1,2
Ö = Ö = ?? = Ö
1 2
H1 : Au mois un des 1,2 0 [ 1, ]
Ö i ? ? i ? p .
Les tests peuvent être conduites en utilisant les tests
portant plusieurs paramètres à la fois (test de Wald) Par
ailleurs, si l'on est amené à rejeter les deux hypothèses
nulles, on a une causalité bidirectionnelle, on parle de boucle
rétroactive (feedback effect).
1.2.b. Cointegration :
Rappelons la définition d'un porcessus
intégré :
Définition :
Un processus (Xt, t? Z) est un processus DS
(Differency Stationnary) d'ordre d, ou un processus intégré
d'ordre d, si le processus filtré défini par d
(1 - L) X t est stationnaire.Partant de là, on
peut
introduire la notion de cointégration :
Définition :
On considère un processus vectoriel '
X t = (x 1,t x 2,t ...x N,t ) de
dimension (N, 1) intégré d'ordre d. Les processus
(xi,t , t ?Z) sont dits cointégrés si et seulement si
il existe un vecteur
á = (á1
á2 .. .áN) ?Rtel que la
combinaison linéaire '
N áX t est stationnaire ou
intégré d'ordre 0. Le
vecteurá correspond à un vecteur de
cointégration.
Test du nombre de relation de cointégration (Test
de la trace):
Le test de Johansen (1988) est fondé sur l'estimation de
:
Ä X t = 0 + 1ÄX t-1 + 2ÄX
t-2 + ... + p-1ÄX t-p+1 + Ð X t-1 + å
t
|
i
Où 0=C et [ ]
= Ö ? ? ?
I, j 1,i
i j
j 1
=
|
p
, et la matrice Ö - I = áâ de
dimension r × k .
'
Ð = m
m=1
|
r étant alors le nombre de relations de
cointégrations, k le nombre de variable du modèle VAR, et les
colonnes de â Correspondant aux vecteurs de
cointégration.
Ce test est fondé sur les vecteurs propres correspondant
aux valeurs propres les plus élevées de la
K
matrice Ð. A partir des valeurs de celle ci on construit la
statistique : ë (r) N ln(1 ë )
= - -
trace i
i r 1
= +
- N : nombre d'observation, - r : rang de la matrice,
-ë i : ivaleur propre de la matrice Ð ,
éme
- K : nombre de variable du modèle VAR.
Cette statistique suit une loi de probabilité
tabulée par Johansen et Juselius (1990). Ce test fonctionne par
exclusion d'hypothèses alternatives :
1. Test 0
H : r = 0 contre H1 : r > 0. Test de
l'hypothèse aucune relation de cointégration contre au moins une
relation. Sië trace(0) est supérieur à
la valeur lue dans la table au seuil á %, on rejette
H0 , il existe au moins une relation, on passe alors à
l'étape suivante, sinon on arrête et r = 0.
2. Test 0
H : r = 1 contre H1 : r > 1. . Test de
l'hypothèse une relation de cointégration contre au moins deux
relation. Si ë trace(1) est supérieure à
la valeur lue dans la tableau seuil á %, on rejette
H0 , il existe au moins deux relations, on passe alors à
l'étape suivante, sinon on arrête et r = 1.
Et ainsi de suite jusqu'à la dernière étape
(si elle est nécessaire) :
Test H0 : 0
H : r = k-1 contre H1 : r > k-1. Test de
l'hypothèse k-1 relation de cointégration contre au moins k-1
relations. Si ë trace (k-1) est supérieure
à la valeur lue dans la table au seuil á %, on rejette
H0 , il existe K relations de cointégration.
Johansen propose cinq spécifications :
1. Pas de tendance déterministe pour Xt ,
équations de cointégration sans constantes,
2. Pas de tendance déterministe pourXt ,
équations de cointégration avec constantes,
3. Tendance déterministe pourXt ,
équations de cointégration avec constantes,
4. Tendance déterministe pourXt ,
équations de cointégration avec tendances linéaires,
5. Tendance quadratique pourXt , équations de
cointégration avec tendances linéaires.
Section 2: Principaux résultats et
interprétation. 2.1. Présentation des données et
méthodologie suivie. 2.1.a. Données :
Dans le cadre de ce mémoire, et pour tester la
présence d'une relation entre éducation et croissance
économique, nous nous proposons de retenir deux types de variables : les
variables éducatives et économiques .Ces différentes
catégories de variables seront analysées dans le cas de
l'Algérie sur la période 1963-2004.
Compte tenu que le capital humain est lié aux efforts
d'éducation consentis par un pays, en ce qui concerne les variables
éducatives, nous nous proposons de retenir :
- Effectifs scolarisés à tous les niveaux confondus
(SCO), ( er éme éme
1 , 2 ,3 Cycle),
- Nombre de bacheliers (BAC),
- Nombre de diplômés du supérieur (SUP),
- Dépenses d'éducation à prix constants
(DEP), (dépenses au niveau du ministère de l'éducation
national).
On a calculé les dépenses d'éducation
à prix constants de la façon suivante:
( ) =
t
DEPprix courants
t ( )
DEPprix constants déflateur du PIB de la date t
Enfin, la variable économique retenue pour mesurer la
croissance économique est le Produit intérieur brut à prix
constants (PIB).
Nos donnés sont extraites de trois sources nationales :
Le Ministère de L'Enseignement Supérieur et de la Recherche
Scientifique (MESRS), le Ministère de l'éducation Nationale
(MEN), l'Office National des Statistiques (ONS), et une source internationale:
la Banque Mondiale (BM).
2.1.b. Méthodologie :
Afin d'étudier les liaisons entre le PIB et les
variables éducatives, nous allons utiliser l'approche des vecteurs
autorégressifs (VAR). Dans un premier temps, un modèle VAR
à quatre variables est estimé pour étudier la relation
entre les variables éducatives (jusqu'à l'obtention du
baccalauréat) et le PIB. Dans un second temps, un modèle VAR
à deux variables est estimé pour étudier la relation entre
le nombre de diplômés et le PIB.
Pour que ces modèles autorégressifs donnent des
résultats satisfaisants, nous procédons à la
stationnarisation des séries chronologiques avant de déterminer
l'ordre du VAR. Nous testons également les degrés de
signification des résidus, et enfin nous vérifions la
stabilité du modèle.
2.2. Application.
2.2.a. Analyse et traitement des séries
:
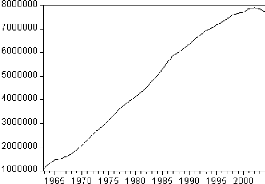
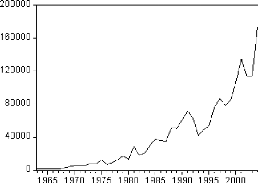
1. Analyse de la série du produit intérieur
brut :
Cette série correspond au produit intérieur brut
à prix constant (PIB) de 1963 à 2004.
Données, Banque Mondial, annuelles, 1963 à 2004, 42
observations.
Evaluation graphique de la non stationnarité :
Série brut :
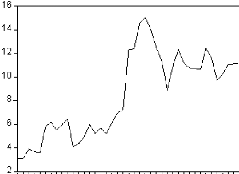
Figure 1: graphique de la série PIB.
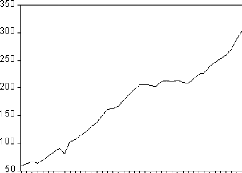


Le graphique de la série du produit intérieur brut
fait ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire.
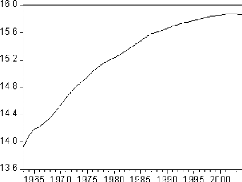
Série transformée :
Afin de stabiliser la série, on lui applique une
transformation logarithmique.
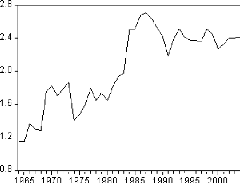
Figure 2: graphique de la série LPIB
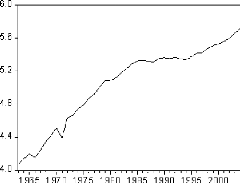

De même, Le graphique de la série logarithme fait
ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire. Néanmoins, cette transformation nous
assure une première différence plus stable.
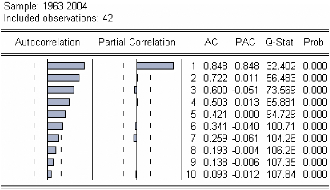
Analyse des autocorrélations et
autocorrélations partielles:
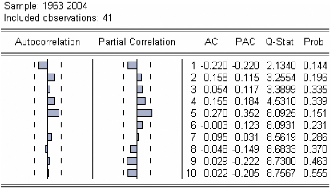
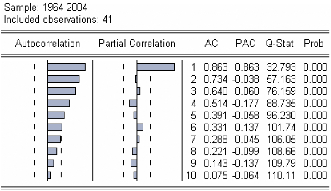
Figure 3 : corrélogramme de la série LPIB.
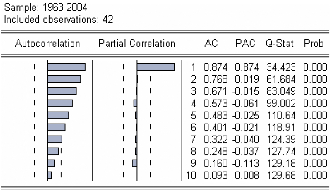
Le premier graphique (corrélogramme) représente
les autocorrélations d'ordre h=1,... ,10 , et
le
deuxième (corrélogramme partiel) les
autocorrélations partielles d'ordre h=1,...,10 . Les colonnes
AC
et PAC reportent les valeurs numériques correspondantes.
Q-Stat est la valeur de la statistique de LjungBox et Prob la p-value
associée.
On remarque que jusqu'au retard h=7 les termes du
corrélogramme sont à l'extérieur de l'intervalle de
confiance (représentées par des traits pointillés
horizontaux).
On constate aussi que toutes les autocorrélations sont
significativement différentes de 0 (Prob pour
h=1,... ,10
inférieurs au seuil de 5%) et décroissent très lentement.
Ceci est aussi caractéristique d'une
série non stationnaire.
Le test Augmented Dickey Fuller (ADF):
Choix du nombre de retards optimal P :
Dans Eviews 5.0, la spécification qui minimise
les critères d'information Akaike (AIC) et Schwarz(SC), est faite
automatiquement dans le cadre de la procédure de test de racine
unitaire. Compte tenu du nombre d'observations disponibles on choisis
pMax =5.
|
Modéle1
|
Modéle2
|
Modéle3
|
|
AIC
|
0
|
1
|
1
|
|
SC
|
0
|
1
|
1
|
Selon le principe de parcimonie, On retient donc p=0
retard.
Stratégie du test:
1-On teste la racine unitaire dans le
modèle3 incluant une constante, et un trend :
ÄLPIB t =öLPIB t - 1
+c +ât + å t
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = - 1.481118 > 3
Cá = -3.50 pour un seuil á
= 5% (-3.50 pour 50 observations). Donc pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). comme
H0 est acceptée on teste: 3
( )
-

H : (c; â; ö) = (c; 0; 0) contre H
1
3
0
SCR C SCR 2 0.11236 0.10019 2
-
3, 3 = ( )
F = =2.307


3 SCR N K
( )
- 0.10019 41 3
( )
-
3
Pour une 50 d'observations et un risque de première
espèce deá =5% on a: F 3 = 2.307 ö 3 =
6.73.
On accepte 3
H0 , le modèle 3 n'est pas le
»bon» modèle, on doit effectuer à nouveau le test de
non
stationnarité dans le modèle 2.
2-On teste la racine unitaire dans le
modèle2 incluant une constante :
ÄLPIB t =öLPIB t - 1
+c + å t
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = - 1.932263 > 2
Cá = -2.93 pour un seuil á
= 5% (-2.93 pour 50 observations). Donc pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). Comme
H0 est acceptée on teste : 2
H : (c;ö) = (c;0) contre H 1 .
2
0
Pour une 50 d'observations et un risque de première
espèce deá =5% on a: F2 = 3.73
ö 2= 5.13. (F2 dans le test DF simple c'est
F-statistic ).
On accepte l'hypothèse 2
H0 . Dans ce cas, le modèle 2
n'est pas le »bon» modèle, on doit effectuer à nouveau
le test de non stationnarité dans le modèle
1.
3-On teste la racine unitaire dans le modèle1
sans constante ni tendance:
ÄLPIB t =öLPIB t - 1 +
å t
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = 4.5 1528 > 1
Cá = -1.95 pour un seuil á
=5% (-1.95 pour 50 observations). Donc pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). Par
conséquent, la série LPIB t est :
I(1).
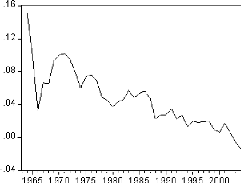
Vérification de l'ordre
d'intégration:
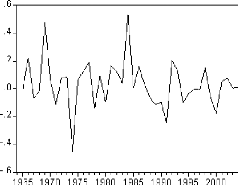
Figure 4 : graphique de la série DLPIB.
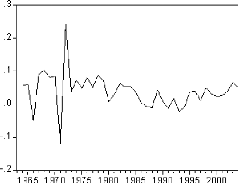

D'après le graphique de la série en
différence première. Il semble que la série soit
stationnaire.
Le test Augmented Dickey Fuller (ADF):
On teste la racine unitaire dans le modèle suivant: 2
Ä LPIB t =öÄLPIB
t - 1 +í t
t ö = - 5.022624 < 1
Cá = -1.95 pour un seuil á
= 5% (-1.95 pour 50 observations). Donc pour un
à = 0
niveau de risqueá =5% , on refuse
l'hypothèse nul de racine unitaire( ö = 0). Autrement dit : la
série ÄLPIB t = å test :
I(0). (Correspond à un l'innovation
åt ).
Graphiques de la série originale et la série
générée:
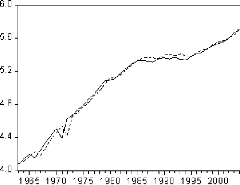
On compare ici, le graphique de la série originale (LPIB)
et la série générée (GLPIB, avec:GLPIB t =
LPIB t - 1 +e t ), pour s'assurer que notre
démarche de stationnarisation nous a
donné de bons résultas.
Figure 5: graphiques de LPIB et GLPIB.

Analyse du résidu :
On analyse le résidu : å t = ÄLPIB
t
Figure 6: corrélogramme de l'innovation
åt .
On remarque que pour les retards h=1, ,10 , les termes du
corrélogramme sont à l'intérieur de
l'intervalle de confiance (représentées par des
traits pointillés horizontaux).
Le test de Ljung -Box nous indique que toutes les
autocorrélations sont significativement nulles:
H : ñ = ñ = ñ
= = ñ 10 = 0 Contre H 1 : ? j ? [ 1,10 ]
tq : ñ j = 0
0 1 2 3
10 2
ñ à
Q N N
' = + =
( )
2 8.7567
k < 2
÷ 10(10) = 18.307 .on accepte H
0 , en plus (Prob pour
h -
k = 1 N K
h=1, ... ,10 supérieurs au seuil de 5%).Par
conséquent, le résidu peut être assimilé à un
processus bruit blanc.
En définitive : la série LPIB t
est non stationnaire (I(1)). Dés lors,
pour rendre la série
stationnaire, il faut la différencier une fois.
La série SLPIB t issue de la
série LPIB t est quant à elle stationnaire. On note
alors : SLPIB t = ÄLPIB t
2. Analyse de la série des dépenses
d'éducation:
Cette série correspond aux dépenses
d'éducation à prix constant (DEP) de 1964 à 2004.
Données, Ministère de l'éducation nationale,
annuelles, 1964 à 2004, 41 observations.
Evaluation graphique de la non stationnarité
:
Série brute :
Figure 1: graphique de la série DEP.


Le graphique de la série brute des dépenses
d'éducation fait ressortir une tendance globale à la hausse. Il
semble donc que la série soit non stationnaire.
Série transformée :
Afin de stabiliser la série, on lui applique une
transformation logarithmique.
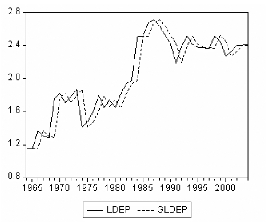
Figure 2: graphique de la série LDEP.

De même, Le graphique de la série logarithme fait
ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire. Néanmoins, cette transformation nous
assure une première différence plus stable.
Analyse des autocorrélations et
autocorrélations partielles:
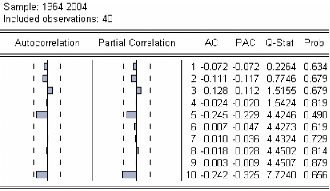
Figure 3 : corrélogramme de la série LDEP.
Le premier graphique (corrélogramme) représente les
autocorrélations d'ordre h=1,... ,10 , et le
deuxième
(corrélogramme partiel) les autocorrélations partielles
d'ordre h=1,...,10 . Les colonnes AC
et PAC reportent les valeurs
numériques correspondantes. Q-Stat est la valeur de la statistique de
Ljung-
Box et Prob la p-value associée.
On remarque que jusqu'au retard h=6 les termes du
corrélogramme sont à l'extérieur de l'intervalle de
confiance (représentées par des traits pointillés
horizontaux).
On constate aussi que toutes les autocorrélations sont
significativement différentes de 0 (Prob pour h=1,... ,10
inférieurs au seuil de 5%) et décroissent très lentement.
Ceci est aussi caractéristique d'une série non stationnaire.
Le test Augmented Dickey Fuller (ADF):
Choix du nombre de retards optimal P :
Dans Eviews 5.0, la spécification qui minimise
les critères d'information Akaike (AIC) et Schwarz(SC), est faite
automatiquement dans le cadre de la procédure de test de racine
unitaire. Compte tenu du nombre d'observations disponibles on choisis
pMax =4.
|
Modéle1
|
Modéle2
|
Modéle3
|
|
AIC
|
0
|
0
|
0
|
|
SC
|
0
|
0
|
0
|
On retient donc p=0 retard.
Stratégie du test:
1-On teste la racine unitaire dans le
modèle3 incluant une constante, et un trend :
ÄLDEP t =öLDEP t - 1 +
c + ât + å t .
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = - 2.120489 > 3
Cá = -3.50 pour un seuil á
=5% (-3.50 pour 50 observations). Donc, pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nulle de racine unitaire( ö = 0).
comme H0 est acceptée on teste: 3
H : (c; â; ö) = (c; 0; 0) contre H
1
3
0

2 = ( )
1.15200 1.00809 2
-
=2.6409
F3
( )
SCR C SCR
3, 3
-
SCR N K
( )
- 1.00809 40 3
( )
-
3
Pour 50 observations et un risque de première
espèce deá =5% on a: F 3 = 2.64 ö 3 = 6.73
.
On accepte 3
H0 , le modèle 3 n'est pas le
»bon» modèle, on doit effectuer à nouveau le test de
non
stationnarité dans le modèle 2.
2-On teste la racine unitaire dans le
modèle2 incluant une constante :
ÄLDEP t =öLDEP t - 1 +
c + å t
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = - 1.870984 > 2
Cá = -2.93 pour un seuil á
= 5% (-2.93 pour 50 observations). Donc pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). 2-comme
H0 est acceptée on teste: 2
H : (c;ö) = (c;0) contre H 1
2
0
Pour 50 observations et un risque de première
espèce deá =5% on a: F2 = 3.50
ö 2 = 5.13. (F2 dans le test DF simple c'est
F-statistic )
On accepte l'hypothèse 2
H0 . Dans ce cas, le modèle 2
n'est pas le »bon» modèle, on doit effectuer à nouveau
le test de non stationnarité dans le modèle
1.
3-On teste la racine unitaire dans le modèle1
sans constante et sans tendance:
ÄLDEP t =öLDEP t - 1 +
å t
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = 0.725219> 1
Cá = -1.95 pour un seuil á
= 5% (-1.95 pour 50 observations). Donc, pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). Par
conséquent, la série LDEP t est :
I(1).
Vérification de l'ordre
d'intégration:
Figure 4 : graphique de la série DLDEP.

D'après le graphique de la série en
différence première, il semble que la série soit
stationnaire.
Le test Augmented Dickey Fuller (ADF):
On teste la racine unitaire dans le modèle suivant: 2
Ä LDEP t =öÄLDEP
t - 1 +í t
t ö = - 6.385222 < 1
Cá = -1.95 pour un seuil á
= 5% (-1.95 pour 50 observations). Donc, pour un
à = 0
niveau de risqueá =5% , on refuse
l'hypothèse nul de racine unitaire( ö =0) Autrement dit : la
série ÄLDEP t = å test :
I(0). (Elle Correspond à l'innovation
åt ) Graphiques de la série originale
et la série générée:
On compare ici, le graphique de la série originale
(LDEP) et la série générée (GLDEP, avec: GLDEP
t = LDEP t - 1 + et), pour s'assurer que
notre démarche de stationnarisation nous a donné bons
résultas.
Figure 5: graphiques de LDEP et GLDEP.
Analyse du résidu :
On analyse le résidu : å t = ÄLDEP
t
Figure 5: corrélogramme de l'innovation
åt .
On remarque que pour les retards h=1,... ,10 , les termes du
corrélogramme sont à l'intérieur de l'intervalle de
confiance (représentées par des traits pointillés
horizontaux).
Le test de Ljung -Box nous indique que toutes les
autocorrélations sont significativement nulles:
H : ñ = ñ =
ñ = = ñ 10 = 0 Contre H 1 : ? j
? [ 1,10 ] tq : ñ j = 0
0 1 2 3
10 2
ñ à
Q N N
' = + =
( )
2 7.7240
k < 2
÷ 10(10) = 18.307 .on accepte H
0 , en plus (Prob pour
h -
k = 1 N K
h=1, ... ,10 supérieurs au seuil de 5%).Par
conséquent, le résidu peut être assimilé à un
processus bruit blanc.
En définitive : la série LPDEP
t est non stationnaire (I(1)).Dés lors,
pour rendre la série stationnaire, il faut la différencier une
fois.
La série SLDEP t issue de la
série LDEP t est quant à elle est stationnaire. On
note : SLDEP t = ÄLDEP t
3. Analyse de la série des effectifs
scolarisés à tous les niveaux confondus:
Cette série correspond aux effectifs scolarisés
à tous les niveaux (SCO) de 1963 à 2004. Données,
Ministère de l'éducation nationale, annuelles, 1963 à
2004, 42 observations,
Evaluation graphique de la non stationnarité
:
Série brut :
Figure 1: graphique de la série SCO.

Le graphique de la série des effectifs scolarisés
à tous les niveaux fait ressortir une tendance globale à la
hausse. Il semble donc que la série soit non stationnaire.
Série transformée :
Afin de stabiliser la série, on lui applique une
transformation logarithmique.
Figure 2: graphique de la série LSCO.

De même, Le graphique de la série logarithme fait
ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire. Néanmoins, cette transformation nous
assure une première différence plus stable.
Analyse des autocorrélations et
autocorrélations partielles:
Figure 3 :corrélogramme de la série LSCO.
Le premier graphique (corrélogramme) représente
les autocorrélations d'ordre h=1,... ,10 , et
le
deuxième (corrélogramme partiel) les
autocorrélations partielles d'ordre h=1,...,10 . Les colonnes
AC
et PAC reportent les valeurs numériques correspondantes.
Q-Stat est la valeur de la statistique de LjungBox et Prob la p-value
associée.
On remarque que jusqu'au retard h=6 les termes du
corrélogramme sont à l'extérieur de l'intervalle de
confiance (représentées par des traits pointillés
horizontaux).
On constate aussi que toutes les autocorrélations sont
significativement différentes de 0 (Prob pour
h=1,... ,10
inférieures au seuil de 5%) et décroissent très lentement.
Ceci est aussi caractéristique d'une
série non stationnaire.
Le test Augmented Dickey Fuller (ADF):
Choix du nombre de retards optimal P :
Dans Eviews 5.0, la spécification qui minimise
les critères d'information Akaike (AIC) et Schwarz(SC), est faite
automatiquement dans le cadre de la procédure de test de racine
unitaire. Compte tenu du nombre d'observations disponibles on choisis
pMax =4.
|
Modéle1
|
Modéle2
|
Modéle3
|
|
AIC
|
4
|
3
|
3
|
|
SC
|
1
|
1
|
3
|
Selon le principe de parcimonie, on retient donc p=1
retard.
Stratégie du test:
1-On estime le modèle3 incluant une
constante, un trend, et un terme différencié retardé:
Ä = ö + + â + î
Ä - + å
LSCO LSCO - c t LSCO t t
t 1
t 1
On teste : H0: ö = 0 vs H1:
ö < 0
t ö =0.804372 > 3
Cá = -3.50 pour un seuil á
=5% (-3.50 pour 50 observations). Donc pour, un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). 2-comme
H0 est acceptée on teste: 3
H : (c; â; ö) = (c; 0; 0) contre H
1
3
0

F3
=
2 = ( )
0.00978 0.00666 2
-
=8.439
( )
SCR C SCR
3, 3
-
SCR N K
( )
- 0.00666 40 4
( )
-
3
Pour une 50 d'observations et un risque de première
espèce deá =5% on a: F 3 = 8.43 9 ö 3 =
6.73. On rejette l'hypothèse 3
H0 , le modèle 3 est le
»bon» modèle.
Conclusion:
LSCO t est I(1)+T+C et ÄLSCO
t est TS . Avec: Ä t = + â
+ îÄ - 1 + å .
LSCO c t LSCO t t
Vérification de l'ordre
d'intégration:
Figure 4 : graphique de la série DLSCO.

D'après le graphique de la série en
différence première, il semble que la série soit
affectée d'une tendance déterministe.
Le test Augmented Dickey Fuller (ADF):
On teste la racine unitaire dans le modèle suivant: 2
Ä LSCO = c + â t +
îÄ LSCO t - + í t
2
t 1
On teste : H0: ö = 0 vs H1:
ö < 0
t ö =-5.259241 < 3
Cá = -3.50 pour un seuil á
=5% (-3.50 pour 50 observations). Donc pour un
à = 0
niveau de risqueá = 5% , on refuse
l'hypothèse nul de racine unitaire( ö = 0). La
différence première n'admet alors pas de racine unitaire.
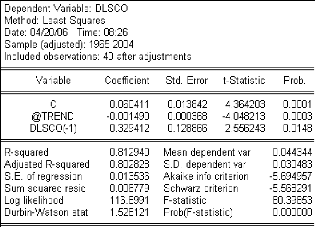
Estimation du modèle :
On estime le modèle suivant : Ä t = +
â + îÄ - 1 + å .
LSCO c t LSCO t t
Figure 5 : Estimation du modèle.
-Le coefficient de la tendance est significativement non
nul pour un niveau de risqueá =5%,
à
0.001490
ó à 0.000368
â
4.048> 1.96. (Prob inférieure à 5%).
â
tâà = 0
-La constante est significativement non nulle pour un niveau de
risqueá =5%,
0.078971
t 4.92 1.96
= = =
à C= 0 ó à C 0.016037
Cà
. (Prob inférieure à 5%).
-Le coefficient î est significativement non nul
pour un niveau de risqueá =5%, à
î 0.3294 12 t2.55 1.96
à= 0 = = =
ó à 0.128866
î
î
(Prob inférieure à 5%).
Par conséquent, le modèle en différence
première peut être estimé par:
ÄLSCO = 0.06 - 0.001 t + 0.33 LSCO t-1 .
Ä + et
t
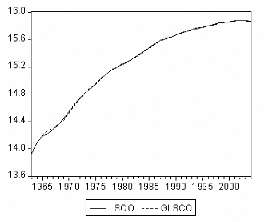
Graphiques de la série originale et la série
générée:
On compare ici, le graphique de la série originale (LSCO)
et la série générée (GLSCO,
avec: t t
GLSCO =LSCO+ 0.06 - 0.001 t + 0.33 ÄLSCO t-1
+et .), pour s'assurer que notre démarche de
stationnarisation nous a donné bons résultas.
Figure 5: graphiques de LSCO et GLSCO.
Analyse du corrélogramme des résidus
d'estimation:
On analyse le résidu d'estimation
åt du modèle: Ä t = + â +
îÄ - 1 + å .
LSCO c t LSCO t t
Figure 6: corrélogramme des résidus
d'estimation.
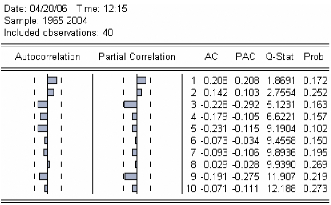
On remarque que pour les retards h=1,... ,10 , les termes du
corrélogramme sont à l'intérieur de
l'intervalle de confiance (représentées par des
traits pointillés horizontaux).
Le test de Ljung -Box nous indique que toutes les
autocorrélations sont significativement nulles:
H : ñ = ñ = ñ
= = ñ 10 = 0 Contre H 1 : ? j ? [ 1,10 ]
tq : ñ j = 0
0 1 2 3
10 2
ñ à
QN N
' = + =
( )
2 15.487
k < 2
÷ 10(10) = 18.307 .on accepte
H0 , en plus (Prob pour
h -
k = 1 N K
h=1, ... ,10 supérieurs au seuil de 5%).Par
conséquent, le résidu peut être assimilé à un
processus bruit blanc.
En définitive, la série LSCO t est non
stationnaire de type DS (I(1)+T+C).
Dés lors, on considère
la série SLSCO t stationnaire définie
par :
SLSCO = (LSCO -LSCO ) - (0.06 - 0.001 t ) LSCO t -
(0.06 - 0.001 t )
= Ä .
t t t-1
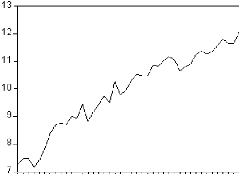
4. Analyse de la série du nombre de bacheliers
:
Cette série correspond au nombre de bacheliers (BAC) de
1963 à 2004.
Données, Ministère de l'éducation nationale,
annuelles, 1963 à 2004, 42 observations.
Evaluation graphique de la non stationnarité :
Série brut :
Figure 1: graphique de la série BAC.

Le graphique de la série du nombre de bacheliers fait
ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire.
Série transformée :
Afin de stabiliser la série, on lui applique une
transformation logarithmique.
Figure 2: graphique de la série LBAC.


De même, Le graphique de la série logarithme fait
ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire. Néanmoins, cette transformation nous
assure une première différence plus stable.
Analyse des autocorrélations et
autocorrélations partielles:
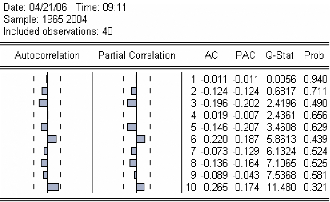
Figure 3 :corrélogramme de la série LBAC.
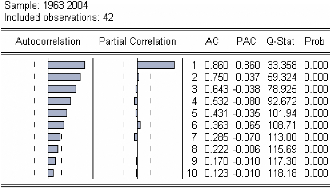
Le premier graphique (corrélogramme) représente
les autocorrélations d'ordre h=1,... ,10 , et
le
deuxième (corrélogramme partiel) les
autocorrélations partielles d'ordre h=1,...,10 . Les colonnes
AC
et PAC reportent les valeurs numériques correspondantes.
Q-Stat est la valeur de la statistique de LjungBox et Prob la p-value
associée.
On remarque que jusqu'au retard h=6 les termes du
corrélogramme sont à l'extérieur de l'intervalle de
confiance (représentées par des traits pointillés
horizontaux).
On constate aussi que toutes les autocorrélations sont
significativement différentes de 0 (Prob pour
h=1,... ,10
inférieurs au seuil de 5%) et décroissent très lentement.
Ceci est aussi caractéristique d'une
série non stationnaire.
Le test Augmented Dickey Fuller (ADF):
Choix du nombre de retards optimal P :
Dans Eviews 5.0, la spécification qui minimise
les critères d'information Akaike (AIC) et Schwarz(SC), est faite
automatiquement dans le cadre de la procédure de test de racine
unitaire. Compte tenu du nombre d'observations disponibles on choisis
pMax =5.
|
Modéle1
|
Modéle2
|
Modéle3
|
|
AIC
|
1
|
5
|
1
|
|
SC
|
1
|
1
|
1
|
Selon le principe de parcimonie, on retient donc p=1
retard.
Stratégie du test:
1-On teste la racine unitaire dans le
modèle3 incluant une constante, un trend,et un terme
différencié retardé :
ÄLBAC =öLBA C- + c
+ â t + î Ä LBAC + å
t
t 1
t t -1
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = -2.256430 > 3
Cá = -3.50 pour un seuil á
=5% (-3.50 pour 50 observations). Donc, pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0).
comme H0 est acceptée on teste: 3
( )
-

H : (c; â; ö) = (c; 0; 0) contre H
1
3
0
SCR C SCR 2 2.9333 2.5375 2
-
3, 3 = ( )
F = =2 .808

3 SCR N K
( )
- 2.5375 40 4
( )
-
3
Pour une 50 d'observations et un risque de première
espèce deá =5% on a: F 3 = 2.808 ö 3 =
6.73.
On accepte 3
H0 , le modèle 3 n'est pas le
»bon» modèle, on doit effectuer à nouveau le test de
non
stationnarité dans le modèle 2.
2-On teste la racine unitaire dans le
modèle2 incluant une constante et un terme
différencié retardé:
ÄLBAC = ö LBA C - + c +
Ä LBAC + å t .
t t 1 t - 1
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = - 1.162102 > 2
Cá = -2.93 pour un seuil á
= 5% (-2.93 pour 50 observations). Donc pour un
à = 0
niveau de risqueá =5% , on accepte
l'hypothèse nul de racine unitaire( ö = 0). 2-comme
H0 est acceptée on teste: 2
H : (c;ö) = (c;0) contre H 1
2
0
( )
SCR C SCR
2, 2
-
( )
N K
-
2 = ( )
3.71 2.83 2
-
2.83 40 3
( )
-
F2 =



=5.7523.
2
SCR

Pour une taille de 50 et un risque de première
espèce deá = 5% on a: F2 = 5.75
ö 2= 5.13 On rejette l'hypothèse 2
H0 . Dans ce cas, le modèle 2
est le »bon» modèle, et la série LBAC t est
non stationnaire (I(1)+C ou I(d)+C ), d > 1.
Vérification de l'ordre
d'intégration:
Figure 4 : graphique de la série DLBAC.
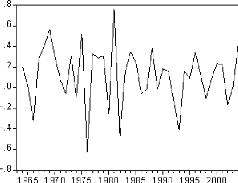

D'après le graphique de la série du nombre de
bacheliers en différence première, il semble que la série
soit stationnaire.
Le test Augmented Dickey Fuller (ADF):
On teste la racine unitaire dans le modèle suivant:
Ä LBAC = ö Ä LBAC - +
c + Ä LBAC + t
2 2 í
t 1
t t - 1
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = - 5.33666 < 2
Cá = -2.93 pour un seuil á
=5% (-2.93 pour 50 observations). Donc, pour un
à = 0
niveau de risqueá =5% , on refuse
l'hypothèse nul de racine unitaire( ö = 0). Autrement dit : la
série ÄLBA C t est stationnaire
I(0)+C.
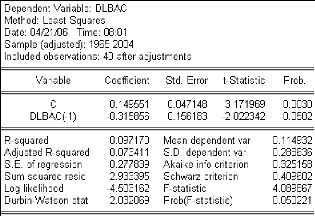
Analyse des résidus d'estimation de la
série LBAC : On analyse le résidu d'estimation
åt du modèle : t
Ä LBAC = c + î
ÄLBA C t - 1 + å t
Figure 5 : résultats d'estimation du modèle.
|
-La constante
t
risqueá = 5% , àC= 0
-Le coefficient
|
=
|
Cà
|
est
=
|
significativement non nul pour
0. 149551
=3.17 1.96 inférieur à 5%)
(Prob
|
un
un
|
niveau
niveau
|
de
de
|
|
î
|
ó àC0.047148
est significativement non nul pour
|
|
risqueá = 5% , à= 0
t î
|
|
à
î
|
|
0.3 15856
0. 156183
|
=2.02 1.96
|
(Prob ? 5%).
|
|
à
|
|
|
ó î
|
|
|
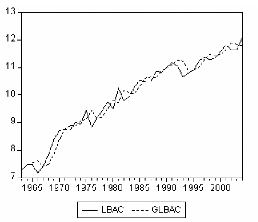
Graphiques de la série originale et la série
générée:
On compare ici, le graphique de la série originale (LBAC)
et la série générée (GLBAC,
avec: t t
GLBA C = LBA C + 0.149 - 0.31 6ÄLBA C
t - 1 + et), pour s'assurer que notre démarche
de
stationnarisation nous a donné bons résultas.
Figure 5: graphiques de LBAC et GLBAC.
Analyse du corrélogramme des résidus
d'estimation:
Figure 6: corrélogramme des résidus d'estimation
On remarque que pour les retards h=1,... ,10 , les termes du
corrélogramme sont à l'intérieur de
l'intervalle de confiance (représentées par des
traits pointillés horizontaux).
Le test de Ljung -Box nous indique que toutes les
autocorrélations sont significativement nulles:
H : ñ = ñ = ñ
= = ñ 10 = 0 Contre H 1 : ? j ? [ 1,10 ]
tq : ñ j = 0
0 1 2 3
10 2
ñ à
QN N
' = + =
( )
2 11.48
k < 2
÷ 10(10) = 18.307 .on accepte
H0 en plus (Prob pour
h -
k = 1 N K
h=1, ... ,10 supérieurs au seuil de 5%).Par
conséquent, le résidu peut être assimilé à un
processus bruit blanc.
En définitive : la série LBAC t est non
stationnaire (I(1)+C). Dés lors, pour rendre la
série stationnaire
il faut la différencier une fois.
La série SLBA C t issue de la
série LBAC t et quant à elle,stationnaire. On note
:
SLBAC t =ÄLBAC t
5. Analyse de la série du nombre de
diplômés :
Cette série correspond au nombre de diplômés
(DIP) de 1963 à 2004.
Données, Ministère de l'enseignement
supérieur et de la recherche scientifique, annuelles, 1963 à
2004, 42 observations.
Evaluation graphique de la non stationnarité
:
Série brut :
Figure 1: graphique de la série DIP.
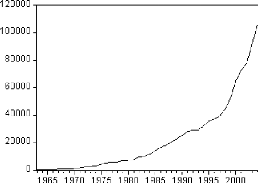

Le graphique de la série du nombre de
diplômés fait ressortir une tendance globale à la hausse.
Il semble donc que la série soit non stationnaire.
Série transformée :
Afin de stabiliser la série, on lui applique une
transformation logarithmique.
Figure 2: graphique de la série LDIP.
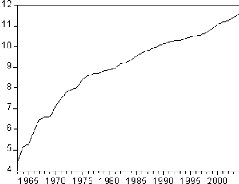

De même, Le graphique de la série logarithme fait
ressortir une tendance globale à la hausse. Il semble donc que la
série soit non stationnaire.
Analyse des autocorrélations et
autocorrélations partielles:
Figure 3 : corrélogramme de la série LDIP.
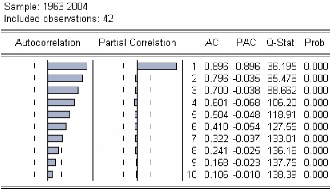
Le premier graphique (corrélogramme) représente
les autocorrélations d'ordre h=1,... ,10 , et
le
deuxième (corrélogramme partiel) les
autocorrélations partielles d'ordre h=1,...,10 . Les colonnes
AC
et PAC reportent les valeurs numériques correspondantes.
Q-Stat est la valeur de la statistique de LjungBox et Prob la p-value
associée.
On remarque que jusqu'au retard h=7 les termes du
corrélogramme sont à l'extérieur de l'intervalle de
confiance (représentées par des traits pointillés
horizontaux).On constate aussi que toutes les autocorrélations sont
significativement différentes de 0
(Prob pour h=1,... ,10 inférieures au seuil de 5%) et
décroissent très lentement. Ceci est aussi
caractéristique d'une série non stationnaire.
Le test Augmented Dickey Fuller (ADF):
Choix du nombre de retards optimal P :
Dans Eviews 5.0, la spécification qui minimise
les critères d'information Akaike (AIC) et Schwarz(SC), est faite
automatiquement dans le cadre de la procédure de test de racine
unitaire. Compte tenu du nombre d'observations disponibles on choisis
pMax =4.
|
Modéle1
|
Modéle2
|
Modéle3
|
|
AIC
|
4
|
2
|
2
|
|
SC
|
4
|
2
|
2
|
Selon le principe de parcimonie, on retient p=2
retards.
Stratégie du test:
1-On estime le modèle3 incluant une
constante, un trend, et deux termes différenciés
retardés:
Ä = t + + + Ä - + Ä - +
LDIP ö LDIP c â t î LDIP t î LDIP t
å t
t - 1 1 1 2 2
On teste : H0: ö = 0 vs H1:
ö < 0
t ö = -6.408049 < 3
C á = -3.50 pour un seuil á =5%
(-3.50 pour 50 observations). Donc, pour un
à = 0
niveau de risqueá =5% , on refuse
l'hypothèse nul de racine unitaire( ö = 0).
comme H0 est refusée on teste: H0
:â = 0 vs H1 :â ? 0
Le coefficient de la tendance est significativement non nul pour
un niveau de risqueá =5%.
à
0.027470
ó à 0.005474
â
5.017 > 1.96. (Prob inférieure à 5%)
â
tâà = 0
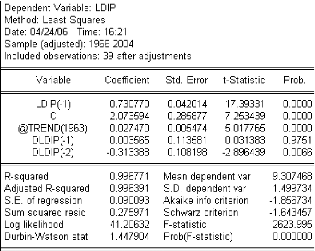
Le modèle 3 est le »bon»
modèle, pour tester la racine unitaire. Par
conséquent, la série LDIP t est
TS. Estimation du modèle :
On estime le modèle : t - 1 1 1 2 2
LDIP ä LDIP c â t î LDIP t î LDIP t
å t
= t + + + Ä - + Ä -+
Figure 5: estimation du modèle.
-Le coefficient ä est significativement non nul
pour un niveau de risqueá =5%.
à
0.730770
t 17.39 1.96
à= 0 = = =
ä ó à 0.042014
ä
ä
(Prob inférieure à 5%).
-Le coefficient de la tendance est significativement non
nul pour un niveau de risqueá =5%.
à
0.027470
ó à 0.005474
â
5.017 > 1.96 (Prob inférieure à 5%)
â
tâà = 0
-La constante est significativement non nulle pour un niveau de
risqueá =5%.
|
Cà 2.073594
t 7.25 1.96
= = =
àC= 0 óC
à0.285877
|
(Prob inférieure à 5%)
|
-Le coefficient î1 n'est pas
significativement non nul pour un niveau de risqueá =5%.
à
1 0.003565
t 0.031 1.96
= = =
î à = 0
1 ó à 0.113581
î 1
î
(Prob supérieure à 5%).
-Le coefficient î2 est
significativement non nul pour un niveau de risqueá =5%.
à
2 0.313388
t 2.89 1.96
= = =
î à = 0
2 ó à 0.108198
î 2
î
(Prob inférieure à 5%).
Par conséquent, la série LDIP t
peut être estimé par :
LDIP LDIP t LDIP t e t .
t = + t + ? Ä - +
2.07 0.73 - 0.027 0.31 2
1
Graphiques de la série originale et la série
générée:
On compare ici, le graphique de la série originale (LDIP)
et la série générée (GLDIP, avec: t
LDIP LDIP t LDIP t e t ), pour s'assurer que
notre démarche de
= + t + ? Ä - +
2.07 0.73 - 0.027 0.31 2
1
stationnarisation nous a donné bons résultas.
Figure 5: graphiques de LDIP et GLDIP.
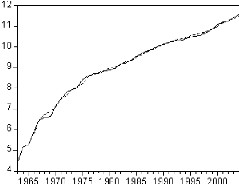

Analyse du corrélogramme des résidus
d'estimation:
On analyse le résidu d'estimation
åt du modèle: t ä - 1
â î 2 2 å .
LDIP LDIP c t LDIP t t
= t + + + Ä - +
Figure 6: corrélogramme des résidus
d'estimation.
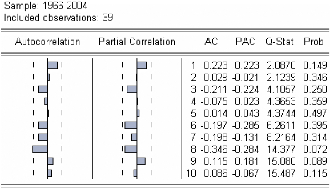
On remarque que pour les retards h=1,... ,10 , les termes du
corrélogramme sont à l'intérieur de
l'intervalle de confiance (représentées par des
traits pointillés horizontaux).
Le test de Ljung -Box nous indique que toutes les
autocorrélations sont significativement nulles:
H : ñ = ñ = ñ
= = ñ 10 = 0 Contre H 1 : ? j ? [ 1,10 ]
tq : ñ j = 0
0 1 2 3
10 2
ñ à
QN N
' = + =
( )
2 15.487
k < 2
÷ 10(10) = 18.307 .on accepte
H0 , en plus (Prob pour
h -
k = 1 N K
h=1, ... ,10 supérieurs au seuil de 5%).Par
conséquent, le résidu peut être assimilé à un
processus bruit blanc.
En définitive, la série LDIP t
est non stationnaire de type TS. Dés lors, on
considère la série stationnaire
SLDIP t issue de la série LDIP
t engendré par :
SLDIP =LDIP -(2.07+0.73LDIP t - 1
+0.027t).
t t
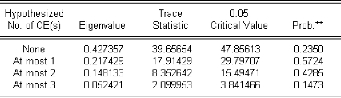
2.2.b. Résultats d'estimation des modèles
:
1. Estimation du premier modèle VAR:
Afin de déterminer si les scolarisés, les
bacheliers et les dépenses d'éducation ont une implication dans
la croissance économique, nous considèrerons les quatre
séries :
- SCO : Effectifs scolarisés à tous le niveaux
confondus (processus DS, I(1)+T+C ), - BAC : Nombre de bacheliers (processus
DS, I(1 )+C ),
- DEP : Dépenses d'éducation (processus DS,
I(1)),
- PIB : Produit intérieur brut (processus DS, I(1) ).
Après avoir procédé à une
transformation logarithmique puis à leurs stationnarisation (les
séries transformées et stationnarisées seront
précésées par les lettre L et S respectivement), on estime
par la suite le modèle VAR.
Choix du nombre de retards :
On utilise les critères d'information AIC et de Schwarz
|
AIC
|
SC
|
|
P=1
|
-9.574658
|
-8.712770
|
|
P=2
|
-9.579533
|
-8.012153
|
|
P=3
|
-9.905313
|
-7.618008
|
Selon le principe de parcimonie, on retient p=1
retard.
Les séries SCO, BAC, DEP, et PIB étant des
processus DS intégrées de même ordre 1. Il faut
vérifier qu'il n'y a pas de cointégration en niveau entre ces
variables.
Test de cointégration :
Les séries initiales étant
caractérisées par une tendance générale à la
hausse, nous choisissons la spécification 3 (tendance dans les
données, constante dans la ou les relations de cointégration)
avec 1 retards.
Figure 1 : Test de Cointégration entre LPIB, LBAC, LDEP,
LSCO.
(Statistique de Johansen)
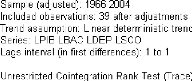

On teste : 0
H : r = 0 contre H1 : r > 0. la statistique de
Johansenëtrace(0) = 39.6547.85 au seuil 5%. Le test indique que
les quatre séries ne sont pas cointégrées.
Résultats d'estimation :
Le VAR estimé s'écrit :
SLSCO 0.001 0.146 0.002 0.004 0.001 SLSCO
t t 1
-
SLDEP 0.014 1.565 0.097 0.016 0.460 SLDEP
- -
t t 1
-
= +
SLBAC 0.106 4.313 0.280 0.313 1.792 SLBAC
- - -
t t 1
-
SLPIB0.047 0.135 0.0002 0.022 0.210 SLPIB
- -
t t - 1
Vérification de la stabilité du VAR
:
Figure 3 : vérification de la stabilité de VAR.
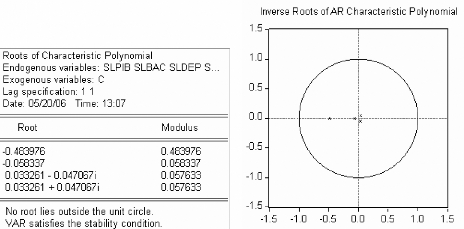
La première colonne donne les l'inverse des racines
associées à la partie AR, et la deuxième colonne leurs
modules. L'inverse des 4 racines associées à la partie AR
appartient au disque unité complexe. Le VAR est par conséquent
stationnaire.
Analyse des résidus :
Figure 4 : graphique des autocorrélations et des
corrélations croisées des résidus.
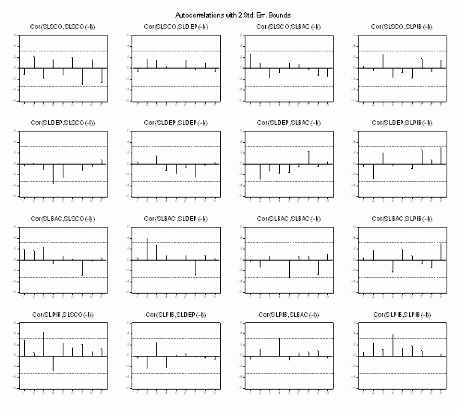
Les graphiques sur la diagonale (corrélogrammes)
représentent les autocorrélations d'ordre h=1,... ,9 , et les
autres graphiques (corrélogrammes croisées) représentent
les corrélations croisées d'ordre h=1,... ,9 . On remarque que
pour les retards h=1,... ,9, les termes des corrélogrammes et des
corrélogrammes croisées sont à l'intérieur de
l'intervalle de confiance (représentées par des traits
pointillés horizontaux).Par conséquent, chaque résidu peut
être assimilé à un processus bruit blanc.
Etude des fonctions de réponse :
Les influences simultanées entre les différentes
variables sont déterminées par les fonctions de réponses
impulsionnelles suivantes :
Figure 4 : Fonctions de Réponses Impulsionnelles.
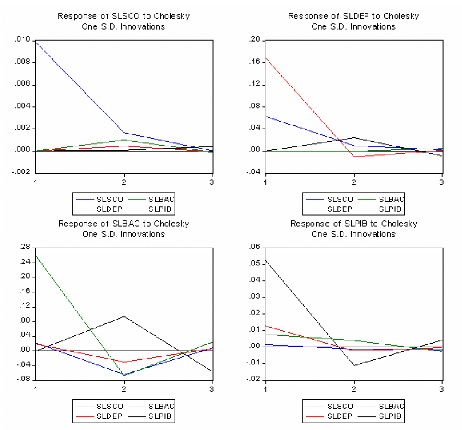
De façon générale, nous remarquons que
les chocs sont transitoires, c'est-à-dire que les variables retrouvent
leur équilibre de long terme au bout de 3 périodes. Toutes les
fonctions de réponse tendent vers 0, ce qui confirme que le
modèle VAR est stationnaire.
Conséquences d'un choc sur La variable SCO:
L'impact d'un choc sur la variable SCO est égal à
0.009847, il se répercute ensuite sur les 4
variables:
- La variable DEP est affectée d'une manière
positive (0.000446) à la éme
2période, puis elle décroît pour
atteindre son niveau d'équilibre,
- La variable BAC est affectée d'une manière
positive (0.000998) à la éme
2période, puis elle décroît pour
atteindre son niveau d'équilibre,
- Le PIB semble ne pas être affecté par ce choc, et
reste sur son sentier d'équilibre.
Conséquences d'un choc sur La variable DEP:
L'impact d'un choc sur la variable DEP est égal à
0.168211, il se répercute ensuite sur les 4 variables: - La variable SCO
et Le PIB sont affectées d'une manière positive à la
éme
1 période et la éme
2période
respectivement mais décroissent rapidement pour retrouver
leur niveau d'équilibre,
- La variable BAC semble ne pas être affecté par ce
choc, et reste sur son sentier d'équilibre. Conséquences
d'un choc sur La variable BAC:
L'impact d'un choc sur la variable BAC est égal à
0.2587, il se répercute ensuite sur les 4 variables: - Le PIB est
affecté d'une manière positive (0.093) la éme
2période, puis décroît et retrouve son
niveau
d'équilibre,
- L variables DEP et SCO sont affectées d'une
manière positive et décroissent jusqu'à la éme
2période,
puis ils croissent pour atteindre leur niveau
d'équilibre.
Conséquences d'un choc sur le PIB:
L'impact d'un choc sur la variable BAC est égal à
0.0522, il se répercute ensuite sur les 4 variables:
- Les variables DEP et BAC sont affectées d'une
manière positive, mais décroissent rapidement pour retrouver leur
niveau d'équilibre.
- La variable SCO semble ne pas être affecté par ce
choc et reste sur son sentier d'équilibre. Etude de la
causalité :
On étudie la causalité entre le PIB, la variable
BAC, la variable DEP, et la variable SCO.
Figure 5 : causalité à la Granger.











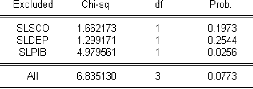
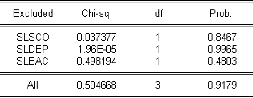
Dans la première équation du modèle
VAR:
SLSCO = 0.001 SLPIB + 0.004 SLBAC + 0.002 SLDEP + 0.146 SLSCO
t-1 + 0.001 + e 1,t .
t t-1 t-1 t-1
au risque 5% les variables PIB, BAC , et DEP ne causent pas la
variable SCO ni individuellement(prob supérieures à 5%), ni
conjointement (ALL: prob supérieures à 5%).
Dans la seconde équation du modèle VAR :
SLDEP = 0.460 SLPIB - 0.016 SLBAC - 0.097 SLDEP + 1.565 SLSCO
t-1 + 0.014 +e 2,t .
t t-1 t-1 t-1
au risque 5% les variables PIB, BAC , et SCO ne causent pas la
variable DEP ni individuellement(prob supérieures à 5%), ni
conjointement (ALL: prob supérieures à 5%).
Dans la troisième équation du modèle
VAR:
SLBAC = 1.792 SLPIB - 0.313 SLBAC - 0.280 SLDEP - 4.313 SLSCO
t-1 + 0.106 + e 3,t .
t t-1 t-1 t-1
au risque 5% les variables DEP et SCO ne causent pas la
variable BAC (prob supérieures à 5%). Par contre le PIB cause la
variable BAC (prob inférieures à 5%), mais conjointement ces
trois variables ne causent pas la variable BAC (prob supérieures
à 5%).
Dans la quatrième équation du modèle
VAR:
SLPIB = - 0.210 SLPIB + 0.022 SLBAC + 0.0002 SLDEP - 0.135 SLSCO
t-1 + 0.047 + e 4,t .
t t-1 t-1 t-1
au risque 5% les variables BAC ,DEP, et SCO ne causent pas le PIB
ni individuellement(prob supérieures à 5%), ni conjointement
(ALL: prob supérieures à 5%).
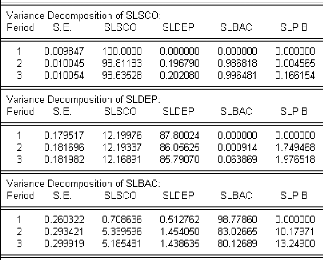
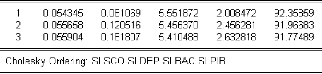
Circuit de causalité:
Figure 6 : circuit de causalité.
+

PIB BAC
- la direction désigne le sens de la causalité.
- le signe (+) peut être obtenu à partir de la
réponse au choc su le PIB.
Analyse de la décomposition de la variance
:
Elle nous permettra de voir dans quelle mesure les variables ont
une interaction entre elles, et dans quel sens l'impact du choc est le plus
important.
Figure 7 : Décomposition de la variance.

Décomposition de la variance de la variable SCO :
- La variance de l'erreur de prévision de la variable SCO
est due à 98% à ses propres innovations, et à 1% à
celle de la variable DEP.
Décomposition de la variance de la variable DEP :
- Pour la éme
1période: La variance de l'erreur de
prévision de la variable DEP est due à 88% à ses
propres innovations, et à 12% à celle de la
variable SCO.
-Pour les périodes 2 et 3 : elles est due
à 86% à ses propres innovations,à 12% à celle de la
variable SCO,et à 2% au PIB.
Décomposition de la variance de la variable BAC :
- Pour la éme
1période: la variance de l'erreur de
prévision de la variable BAC est due à 99% à ses
propres innovations.
- Pour la éme
2période: la variance de l'erreur de
prévision de la variable BAC est due à 83 % à ses
propres innovations, à 5% à celle de la variable
SCO, et à 10% au PIB.
- Pour la éme
3période: la variance de l'erreur de
prévision de la variable BAC est due à 80 % à ses
propres innovations, à 5% à celle de la variable
SCO, et à 13% au PIB.
Décomposition de la variance du PIB:
- La variance de l'erreur de prévision du PIB est due
à 92% à ses propres innovations et à 2% à celle de
la variable BAC, et à 5% à celle de la variable DEP .
2. Estimation du deuxième modèle
VAR:
Afin de déterminer si les diplômés ont une
implication dans la croissance économique, nous considèrerons les
deux séries :
- DIP : nombre de diplômés du supérieur
(processus TS),
- PIB : produit intérieur brut (processus I(1) ).
Après avoir procédé à une
transformation logarithmique des séries, puis à leurs
stationnarisation (les séries transformées et
stationnarisées seront précédées par les lettres L
et S), on estime par la suite le modèle VAR.
Choix du nombre de retards :
On utilise les critères d'information AIC et de Schwarz
|
AIC
|
SC
|
|
P=1
|
-5 .100696
|
-4.842129
|
|
P=2
|
-5.026720
|
-4.835370
|
|
P=3
|
-5 .616068
|
-5.000255
|
|
P=4
|
-5.770901
|
-4.971008
|
|
P=5
|
-5.850764
|
-4.863118
|
Selon le principe de parcimonie, on retient p=3
retards.
Les séries DIP et PIB étant des processus TS et DS
respectivement. Il n'y a donc pas de risque de cointégration entre ces
variables.
Résultats d'estimation: Le VAR
estimé s'écrit:
SLDIP 0.02 0.22 0.34 SLDIP 0.25 0.09 SLDIP 0.20 0.98 SLDIP e
t 1,t
- - -
t - 1 t - 2 t - 3
= + + + +
SLPIB0.030.08 0.11 SLPIB 0.22 0.16 SLPIB 0.07 0.16 SLPIB e
t 2,t
- - -
t 1
- t - 2 t - 3
Vérification de la stationnarité du VAR
:
Figure 3 : vérification de la stabilité de
VAR.
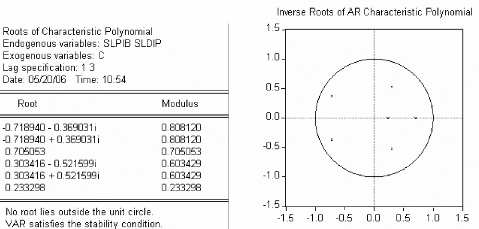
La première colonne donne les inverses des racines
associées à la partie AR (les valeurs propres), et la
deuxième colonne leurs modules. L'inverse des 6 racines associées
à la partie AR appartient au disque unité complexe. Le VAR est
par conséquent stationnaire.
Analyse des résidus :
Figure 4 : graphique des autocorrélations et des
corrélations croisées des résidus.
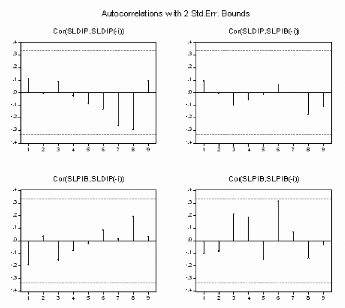
Les graphiques sur la diagonale (corrélogrammes)
représentent les autocorrélations d'ordre h=1,... ,9 , et
les
autres graphiques (corrélogrammes croisées) représentent
les corrélations croisées d'ordre h=1,... ,9 .
On remarque que
pour les retards h=1,... ,9, les termes des corrélogrammes et des
corrélogrammes
croisées sont à l'intérieur de
l'intervalle de confiance (représentées par des traits
pointillés
horizontaux).Par conséquent, chaque résidu
peut être assimilé à un processus bruit blanc.
Etude des fonctions de réponse :
Les influences simultanées entre les différentes
variables sont déterminées par les fonctions de réponses
impulsionnelles suivantes :
Figure 4 : Fonctions de Réponses Impulsionnelles.
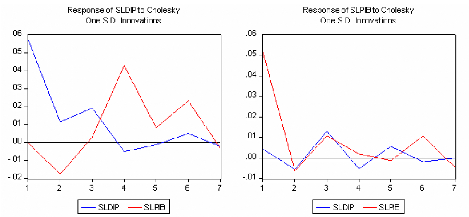
De façon générale, nous remarquons que
les chocs sont transitoires, c'est-à-dire que les variables retrouvent
leur équilibre de long terme au bout de 7 périodes. Toutes les
fonctions de réponse tendent vers 0, ce qui confirme que le
modèle VAR est stationnaire
Conséquences d'un choc sur La variable DIP:
L'impact d'un choc sur la variable DIP est égal à
0.05745 1, il se répercute ensuite sur les 2 variables: - Le PIB est
affecté d'une manière positive et décroît
jusqu'à la éme
2période, puis il croît et atteint son
maximum à la éme
4 période. Par la suite il décroît et
retrouve son niveau d'équilibre.
- La variable DIP est affectée d'une manière
négative (-0.0 17554) à la éme
2période, puis elle croît et
atteint son point maximale à la éme
4période, par la suite elle décroît et
retrouve son niveau
d'équilibre.
Conséquences d'un choc sur La variable PIB:
L'impact d'un choc sur le PIB est égal à 0.05 1728,
il se répercute ensuite sur les 2 variables: - Le PIB est affecté
d'une manière positive (0.051728) et décroît jusqu'à
la éme
2période, puis il croît
jusqu'à la éme
3 période, par la suite il décroît et
retrouve son niveau d'équilibre.
- La variable DIP est affectée d'une manière
positive (0.004434) et décroît jusqu'à la éme
2période, puis
elle croît et atteint son point maximale à la
éme
3période, par la suite elle décroît et
retrouve son niveau
d'équilibre.
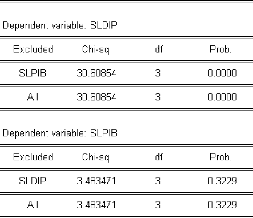
Etude de la causalité :
On étudie la causalité au sens de Granger entre le
PIB et la variable DIP.
Figure 5 : causalité à la Granger.

Dans la première équation du modèle:
SLDIP = - 0.02 - 0.33 SLPIB + 0.09 SLPIB + 0.98 SLPIB + 0.22
SLDIP t-1
t t-1 t-2 t-3
+0.24 SLDIP t-2 - 0.20 SLDIP t-3 +
e1,t . au seuil 5% : le PIB cause la variable DIP (prob
inférieures à 5).
Dans la seconde équation du modèle:
SLPIB = 0.03 - 0.11 SLPIB + 0.16 SLPIB + 0.16 SLPIB - 0.09 SLDIP
t-1
t t-1 t-2 t-3
+ 0.22 SLDIP t-2 - 0.07 SLDIP t-3 +e2,t .
au seuil 5% : la variable DIP ne cause pas le PIB (prob
inférieures à 5%).
Circuit de causalité:
Figure 6 : circuit de causalité.

+
PIB DIP
- la direction désigne le sens de la causalité.
- le signes (+) peut être obtenu à partir des
réponses au chocs.
Analyse de la décomposition de la variance
:
Va nous permettre de voir dans quelle mesure les variables ont
une interaction entre elles, et dans quel sens l'impact du choc est le plus
important.
Figure 7 : Décomposition de la variance.



Décomposions de la variance de la variable DIP:
- Pour les périodes 2 et 3: la variance de
l'erreur de prévision de la variable DIP est due à 92% à
ses propres innovations, et à 8% à celle du PIB.
- Pour les périodes 4, 5,6 et 7: la variance de
l'erreur de prévision de la variable DIP est due en moyenne à 60%
à ses propres innovations, et à 40% à celle du PIB.
Décomposions de la variance du PIB:
-Pour la période 1: la variance de l'erreur de
prévision du PIB est due à 99 % à ses propres innovations
et à 1% à celle de la variable DIP.
-Pour la période 2: la variance de l'erreur de
prévision du PIB est due à 98 % à ses propres innovations
et à 2 % à celle de la variable DIP.
-Pour les périodes 3: la variance de l'erreur de
prévision du PIB est due à 93 % à ses propres innovations
et à 7 % à celle de la variable DIP.
-Pour les périodes 5, 6 et 7: la variance de
l'erreur de prévision du PIB est due à 91 % à ses propres
innovations et à 9 % à celle de la variable DIP.
Interprétation économique de l'ensemble des
résultats :
Afin d'interpréter économiquement les
résultats de l'analyse des fonctions de réponses impulsionnelles,
et les tests de causalités dans les deux modèles Var, il est
utile de rappeler que les fonctions de réponses impulsionnelles
représente l'effet d'un choc d'une innovation sur les valeurs courantes
et futures des variables endogènes. Ainsi, l'explication de
l'interaction entre les variables, sera en fonction de l'environnement
économique de l'année où le choc a été
appliqué (2004) et les années future (les années
après 2004). Par contre, les tests de causalités englobent toute
la période de l'étude. Donc, notre interprétation tiendra
en compte de l'histoire économique de l'Algérie
indépendante.
Par conséquent, on peut dire que, l'augmentation du
nombre de bacheliers dans le 1er modèle VAR et celui du
nombre de diplômés dans le 2nd modèle VAR suite
à une augmentation significative de la croissance économique,
peut être due à un phénomène d'anticipation,
c'est-à-dire que, la croissance future augmente le rendement de
l'éducation, car les revenus futures seront plus élevés
que les revenus sacrifiés aujourd'hui. Ainsi, si les Algériens
anticipent que la croissance sera élevée, ils s'éduqueront
davantage immédiatement.
Les deux relation de causalités positives
trouvées entre la croissance économique et les bacheliers d`une
part, et le PIB et les diplômés d'autre part, sont dues
essentiellement aux investissements effectués par l'Algérie dans
le passé. Ces derniers ont permis la créations et le
développement des structures d'accueils des étudiants, ce qui
à engendré la croissance au fil du temps du nombre de bacheliers
et de diplômés.
En combinons les différents résultats issus de
l'analyse des chocs, des tests de causalités, et de la
décomposition de la variance de l'erreur de prévision on montre
que :
Dans le 1 modèle VAR,
· Une augmentation significative des effectifs
scolarisés n'a pas d'impact sur le PIB, sa variance de l'erreur de
prévision est due à 98% à ses propres innovations,
· Une augmentation significative des dépenses
d'éducation conduit à une augmentation des effectifs
scolarisés et de celle du PIB pendant les 2 années qui suivent le
choc, mais cet impact et non significatif car on n'a pas trouvé de
relations de causalités entre ces variables,
· Une augmentation significative de la richesse du pays,
conduit dans la première année, à une croissance des
dépenses de l'éducation et du nombre de bacheliers, puis à
leur décroissance dans la 2ème année. Cet impact est
significatif pour la variable BAC, car ont a trouver une causalité entre
la croissance économique vers le nombre de bacheliers. Néanmoins,
cette relation de causalité positive reste très fragile, la
variable PIB participe seulement à hauteur de 10% dans la variance de
l'erreur de prévision de la variable BAC,
· Une croissance significative du nombre de bacheliers
conduit à l'augmentation de la croissance économique dans les 2
ans qui suivent le choc. Mais cet impact est non significatif, car on n'a pas
trouvé de relation de causalité de la variable BAC vers la
croissance économique, et en plus la variance de l'erreur de
prévision du PIB est due à 92 % à ses propres
innovations.
Dans le 2ème modèle VAR,
· Une augmentation significative du nombre de
diplômés, conduit ce dernier à décroître dans
la 2ème année, puis à croître est
décroître encore dans les années qui suivent jusqu'a
l'extinction du choc après une période de 7 ans. Cette dynamique
du nombre de diplômés est la même que c'elle du PIB. Mais,
cette interaction entre les diplômés est la croissance
économique reste non significative car, on a pas trouvé de
relation de causalité des diplômés vers le PIB.
· Une augmentation de la croissance économique,
conduit le PIB et le nombre de diplômés à suivre la
même dynamique. Cette interaction parfaite entre la variable PIB et DIP
laisse penser à l'existence d'une relation de causalité positive
entre la croissance économique et le nombre de diplômés.
Cette intuition est vérifiée par les résultats des tests
de causalités, qui montrent que la croissance économique cause le
nombre de diplômés, et par la décomposition de la variance
de l'erreur, qui montre que, la croissance économique explique à
hauteur de 8% de la variance de l'erreur de prévision des
diplômés dans les 2 première années, puis 40%
à partir de la 3 années.
| 
