3-2-3 Evaluation des erreurs de positionnement ou de
poursuite de trajectoire [55] :
La simulation de l'effecteur dans l'espace opérationnel
est donnée par le vecteur x. Si on désigne par:
XD : la situation instantanée de l'effecteur correspond
à la configuration déformée du manipulateur.
XR : La situation de l'effecteur correspond à la
configuration non déformée du manipulateur.
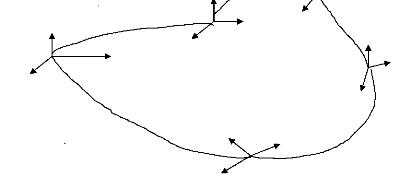
L'erreur de positionnement ou de poursuite de trajectoire
instantané sera donnée par:
ä X = XD - XR .(3.21)
La situation XR de l'effecteur est donnée par le
modèle géométrique direct, dans l'hypothèse rigide
obtenu par le produit des matrices de transformations homogènes
Ces matrices sont calculées sur la base des
paramètres de descriptions géométrique de la topologie du
manipulateur.
Les déformations d'un segment (segment Cj-1)
engendre un torseur des déplacements au
point de l'articulation en
aval (point Oi) du segment et se traduisent par une variation de la
O 'j 1
Trans (xj 1,Lj 1)
C)j
X2j 1
Y'j 1
T~ flex
Yj Zj
o
Xj
Y2j-1
Rot (xj-1, áj-1)
Y3j-1
Z3 j-1
X3 j-1
Rot (Zj-1, èj)
Zj-1
oj-1
X'j 1
Xj-1
Yj 1
j-1
T f ~
transformation relative entre deux repères
consécutifs (le repère {Rj-1 } et le repère {Rj } ) le
modèle d'évaluation de la situation XD de l'effecteur peut
être donc obtenu par un modèle géométrique
modifié basé sur des matrices de transformations homogènes
corrigées pour prendre en compte l'effet des déformations sur la
situation de l'effecteur .
3-2-4 Le modèle géométrique direct
corrige [55]
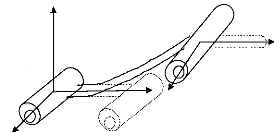
La figure 3.4 représente le corps Cj-1 du
manipulateur dans la configuration rigide puis en position
déformée et les deux référentiels {Rj-1 } et {Rj}
associés aux articulateurs Ai-1 et Ai respectivement.
Y
o
o
Z
Z X
Figure : 3.4 Flexibilité d'un segment du
manipulateur [55]
Le passage de {Rj-1} à {Rj} s'exprime en
fonction des composants du vecteur des
déplacements dus aux
déformations du corps Cj-1 et des trois paramètres de
descriptions áj,
Lj , et èj . Z2j-1
Z'j-1 oj
La manière de transformation définissant le
repère {Rj } dans le repère {Rj-1 } Figure 3.5 est donnée
par:
|
T f Trans X L T flex Rot x Rot ( Z j)
~ ~
j j j j j j j j
1 1 1 4 1 á 1 , è
= * * *
( , )
- - - - - -
( , )
|
.(3.22)
|
Où:
Rot (xj-1) =

Trans (xj-1, Lj-1) =

Rot (zj , èj) =
(3.23)
(3.24)
(3.25)






1 0 0 0
0 0
C S
á á
j j
- - -
1 1
0 0
S C
á á
j j
- -
1 1
0 0 0 1

1

C
è
j
|
S
- è
j 0100 001 0 00
|
|
0 0 Lj-1
01
0
|
0
|
S C
è è
j j 00

~
La matrice de transformation homogène associée aux
déplacements 1
T flexj-
(Translations et rotations) dus aux déformations du corps
Cj-1 . Cette matrice peut être décomposée en
deux matrices:
Une matrice de transformation pure qui représente les
translations dus aux déformations
dx j - 1 , dy j - 1 , dz j - 1
donnée par :
~
Tflex i = 010 dy j -1 (3.26)
000 1
~
Représente les rotations dues aux déformations
Tflexr et une matrice de rotation pure
r x j - 1 , ry j - 1 , r z j - 1 de
la section droite d'abscisse bi-1 au corps Ci-1
point Oi-1 par rapport à l'extrémité
(point Oj-1) , autour des trois axes xj-1 ,
yj-1 , zj-1 respectivement les matrices de transformation
homogène associées à ces rotations , sont donnée
par:
10 00
|
Rot (r xj-1 , xj-1) =
|
0 0
C S
x x
-
0 0
S C
x x
00 01
|
(3.27)
|
|
Cy
|
0 0
S y
|
0100
|
Rot (r yj-1 , yj-1) =
|
-
|
Sy
|
0 0
C y
|
(3.28)
|
0001
Rot (rzj-1 , zj-1) =
S C
z z
0 0 10
00
(3.29)
0 0 01
avec: Cx = cos(r xj-1) , Cy =
cos(r yj-1) , Cz = cos(r zj-1) Sx = sin(r
xj-1) , Sy = sin(r yj-1) , Sz =
sin(r zj-1)
Les rotations rxj-1 , ryj-1 , et
rzj-1 sont des rotations infinitésimales , on peut
écrire:
Cx ? 1 Sy ? ryj
-1 S x ? rxj - 1 Cz ?1
Cy ? 1
, ,
Sz ? rz j -1
|
Rot (r xj-1 , xj-1) =
|
10 0 0
0 10
- rx j - 1
01 0
rx j - 1
00 0
|
(3.30)
|
1
0 0
ry j - 1
0 1 00
Rot (ryj-1 , yj-1) =
- ry j - 1 01 0 (3.31)
0 001
1 - rz j - 1 00
Rot (rzj-1 , zj-1) =
rz j- 1 1 00
0 0 10
(3.32)
0 0 01
~
La matrice homogène est obtenue par le produit des
matrices de transformation 1
T flexri -
Rot (rxj-1 , xj-1) , Rot
(ryj-1 , yj-1) ,et Rot (rzj-1 ,
zj-1), on peut effectuer ce produit dans
n'importe quel ordre ,
En faisant abstraction des valeurs infinitésimales de deuxième
ordre
de type r x j - 1 × ry j - 1 , et ryj
- 1 × r z j - 1 on obtient :
1 0
r r
z y
j j
- -
1 1
r r
z x
1 0
-
j j
- -
1 1
-r r
y x
j j
- -
1 1
~
Tflexr =
1 0
(3.33)
0 0 0 1
La matrice de transformation homogène associée aux
déplacements dus aux déformations du corps Cj-1 ( la
matrice de flexibilité) est donnée donc par:
~ ~
T flexr j- * 1
T flext j-
1
~
= 1
T flexj-
1 r z j - 1
r d
y x
j j
- -
1 1
~
Tflexj- 1
r r
z x
= ? 1 -
j j
- 1
?
.(3.34)
d
1 1
y j -
d
z
j j
- 1
1
- r r
y x
j - 1
1
0 0 0 1
Soit RE (oE , xE , yE , zE ) un repère lié
à l'effecteur , la position et l'orientation de l'effecteur (l'outil)
correspondant à la configuration déformée du manipulateur
, sont définies dans le repère {Ro} par la matrice de
transformation :
|
~
n TfE
|
n-1 T~f
n
|
1~fT 1
o = E
T~f o T~f
2
|
..(3.35)
|
Le modèle géométrique direct
corrigé du manipulateur est l'ensemble des relations qui permettent
d'exprimer la situation de l'effecteur qui correspond à la configuration
déformée du manipulateur Xd en fonction des coordonnées
articulaires q et des vecteurs des déplacements dus aux
déformations des différents segments: [63]
Xd = Fd (q , u) (3.36 a)
Les trois premières composantes de Xj fixent la position
du point OE de l'effecteur par rapport au repère ({RE}/{Ro})
.
3-2-4-1 Procédure et modèle de compensation :
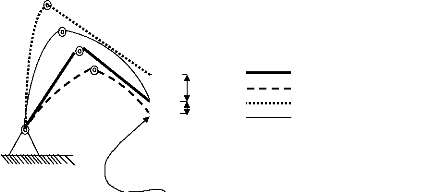
La configuration rigide La configuration
déformée La configuration corrigée
La configuration déformée
après deformation
XC
XE
äX
äX
XC
La situation désirée
Supposons que le manipulateur est dans une configuration q
bien déterminée, les erreurs dues aux déformations des
segments correspondant à cette configuration sont
représentées par le vecteur äX , la correction ou la
compensation de ces erreurs port de l'idée schématisée
ci-après:
On commande le déplacement du manipulateur sur une
situation XC = XR - äX
(La situation de l'effecteur qui correspond à la
configuration corrigée et non déformée du manipulateur)
dans l'espace de travail de telle sorte que:
Xed XC + äX = XE - äX + äX = XE ..(3.36 b)
La situation que doit atteindre le manipulateur rigide permet de
calculer; si elles existent les solutions articulaires possibles.
Parmi ces solutions, il existe une solution définie
dans l'espace articulaire par le vecteur des coordonnées
généralisées (q + äq) qui est la plus
indiquée pour réaliser la tâche car elle se traduit par de
légères corrections sur les variables de commande relativement
à l'hypothèse rigide.
Ainsi au lieu de traiter le problème par la
résolution du modèle géométrique inverse, il est
plus pratique d'utiliser le modèle différentiel:
~
X J q q q J q X
~ - 1
- = = = -
ä ä ä ä
( ) ( ) (3.37)
qC =q+äq (3.38)
äq : Représente le mouvement correctif
à effectuer au niveau des variables articulaires, à partir de la
configuration rigide.
qc : Les coordonnées articulaires
corrigées permettant la compensation des erreurs dues aux
déformations élastiques des segments.
L'organigramme figure 3.7 présente, de manière
chronologique les étapes de calcul nécessaire à
l'évaluation et à la compensation des erreurs de positionnement
ou de poursuite dues aux déformations quasi-statiques des segments d'un
manipulateur en fonction des paramètres cinématiques
(coordonnées, vitesses, et accélérations
généralisées) et de charge.
REMARQUES:
Pour un manipulateur à moins de six degrés de
liberté, plan par exemple, il est bien évident que les mouvements
correctifs - äq ne pourront jamais compenser une erreur qui se
produirait hors plan. Donc dans la relation (3.37), on ne tiendra pas compte
les composantes de - äX qui ne peuvent pas être
engendrées par -äq.
Si l'écart - äX est important, on ne peut pas
compenser l'erreur de positionnement d'un seul coup, mais il faut faire la
compensation par plusieurs itérations.
|
Les données du problème:
- Les paramètres géométriques et
mécaniques du manipulateur . (q , q & , &
& q)- Les paramètres cinématiques
|

|
Modèle géométrique direct:
Situation de l'effecteur dans l'hypothèse du manipultateur
rigide XE = F(q)
|

|
Modèle des déformations :
Evaluation des torseurs des déplacements
élémentaires par segments:
Uj = [ d x j , d y j , d z j , 1
r x j , r y j , r z ]T j = 1 .n.
|

|
Modèle géométrique direct corrigé:
Situation de l'effecteur correspond à la configuration
déformée du manipulateur: Xd = Fd (q , u)
|
|
Modèle d'évaluation des erreurs :
Erreurs de positionnement ou de poursuite: äX = Xd - XE
|
Début

Fin
Modèle de compensation :
0J~(q) Calcul de la
matrice jacobienne du manipulateur: Algorithme de Greville :
0J~(q) la pseudo-inverse de J~ -
1(q) Calcul de la matrice * äX J ~-1(
q)Compensation : äq = -qc = q + äq
3-2-4-2 Calibration et déformation des manipulateurs
:[56,66] :
L'étalonnage ou l'identification
géométrique consiste à déterminer, suite à
une série de mesures et à l'aide d'un modèle
mathématique basée sur un modèle géométrique
de description du manipulateur et des offsets codeurs.
Les valeurs des paramètres géométriques
et des offsets codeurs identifiés au cours de l'étalonnage sont
des valeurs optimisées, l'optimisation est itérative est
basé sur la méthode des moindre carrés. Les
paramètres géométriques identifiés, selon les
procédures classiques de calibration, intégrant moyennement les
effets des déformations.
Manipulateur non calibré, l'écart de
positionnement entre la situation mesurée et la situation
désirée pour une configuration q donné, dépend
surtout des erreurs dues aux déformations :
~
Xmes(q)- Xthé(q) = H (q) * (Pg
réel - Pg nom ) + ? Xdef (q) (3.39)
Avec : Xmes(q) = la situation mesurée.
Xthé(q) = la situation théorique
~
H (q) = la matrice d'identification
Pg réel = les paramètres
géométriques réels du manipulateur
Pg nom= les paramètres
géométriques nominaux du manipulateur
Il est suffisant d'intégrer les erreurs deus aux
déformations dans les valeurs identifiées des paramètres
géométriques de description, la procédure d'identification
est celle qui est classiquement utilisée:
~
Xmes(q)- Xthé(q) = ð(q) x (Pg
thé - Pg nom ) ....(3.40)
Avec : Pg thé : les valeurs des
paramètres géométriques et offsets codeurs
identifiés.
Dans les cas, des manipulateurs flexibles ou applications
exigeantes en précision. La calibration géométrique
préalable n'est pas en mesure de rendre compte, à elle seule du
problème des déformations. La compensation est incontournable et
un modèle des déformations est donc nécessaire.
| 

