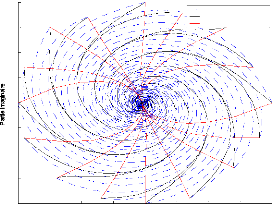
4.2 Résultats de la simulation
La poursuite cyclique hiérarchique
20
1 couche (traditionnelle)
2 couches
4 couches
10
5
15
0
-5
-10
-15
-20
-20 -15 -10 -5 0 5 10 15 20
Partie réelle
FIG. 4-3 - La poursuite cyclique hiérarchique de 16
agents en fonction du nombre de couches.
Poursuite cyclique à Liens
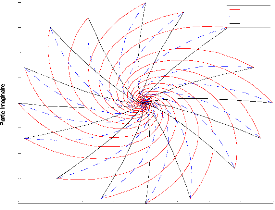
4 liens 8 liens 12 liens
10
5
0
-5
-10
-15
-20
-20 -15 -10 -5 0 5 10 15 20
20
15
Partie réelle
par la simulation (temps de convergence, vitesse moyenne des
agents, nombre de senseurs et les rapports entres les taux de convergence).
4.2.1 Poursuite cyclique
Notre simulation permet de visualiser les agents autonomes,
dotés de senseurs omnidirectionnels représenté par des
points de masses et effectuant une poursuite cyclique, pour se réunir en
vain au centre de rendez-vous. La poursuite cyclique a été
réalisée par les trois méthodes étudiées
dans les chapitres 2 et 3. Nous avons pu déceler quelques règles
via les simulations de ces trois méthodes pour quelques configurations
d'agents dont :
Les agents convergent, dans tous les cas, au centre de
consensus sans jamais se heurter. Ceci confirme la validité des
résultats obtenus par la synthèse théorique et les graphes
tracés sous matlab.
Le temps de convergence des agents augmente, et la vitesse
moyenne diminue quand le nombre d'agents est grand dans une poursuite
cyclique.
- Le temps de convergence dans un schéma
hiérarchique est toujours plus petit, suivi de celui à L liens,
et finalement par la poursuite cyclique traditionnelle. Contrairement à
la vitesse de convergence qui augmente.
- Dans une poursuite hiérarchique, le temps de
convergence est proportionnel, et la vitesse est inversement proportionnelle au
nombre de couches. Cependant, quand ce dernier est grand, le nombre de liens de
communication concrétisés par des capteurs, augmente. Mais ceci
se traduit aussi par une augmentation dans la complexité de calcul, et
de traitement.
- De même pour le schéma à L liens, la
convergence est d'autant plus rapide que le nombre de liens augmente, c'est
même la solution qui converge le mieux sous la condition 4.2 :
Nombre de liens = Nombre d'agents - 1 (4.2)
- Les rapports entre les taux de convergence, approximé
dans le chapitre 2, signifient combien de fois une méthode est plus
rapide que l'autre. Dans les résultats obtenus, La PC
hiérarchique à L couches est N1 fois plus rapide que la PC
à L liens qui est elle même N2 fois plus rapide que la PC
traditionnelle. Avec N1 > N2.
Ceci dit, nous avons pu aussi déduire quelques
inconvénients de cette stratégie notamment en ce qui concerne le
comportement des agents. Ces derniers empruntent un chemin très long
pour atteindre le centre au même moment.
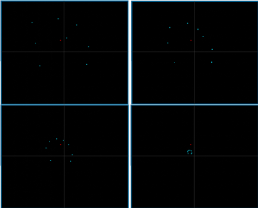
FIG. 4-5 - Le comportement observé des agents avec la
méthode de Menger-Melnikov
En ce qui concerne la PC hiérarchique, la configuration
n'est possible que dans certains cas, notamment lorsque LpNL est un
entier ou lorsque le nombre de groupes est valide quand c'est un schéma
à deux couches.
| 

