3.3. Commande linéaire quadratique gaussienne
(LQG)
Dans le cas de la commande LQR, la loi de commande est
basée sur la représentation d'état du système. La
difficulté de mesurer l'état ( ) fait que l'on
préfère utiliser la commande LQG. Cette dernière est bien
adaptée lorsque l'état du système n'est pas directement
mesurable ou que les mesures sont affectées par le bruit, et la
synthèse de cette commande prend en compte les propriétés
statistiques de perturbations, sans affecter la stabilité.
La synthèse LQG consiste donc à rechercher,
à partir de cette mesure partielle, un régulateur qui minimise un
critère quadratique de nature stochastique.
La commande LQG associe un observateur d'état
basé sur le filtre de Kalman à la commande LQR. L'observateur est
un système dynamique, dont les entrées sont constituées de
l'entrée et de la sortie du système à commander, et qui a
pour fonction de reconstruire l'état du système.
3.3.1. Formulation du problème de commande
(LQG)
Soit le système linéaire décrit par les
équations suivantes :
( ) = ( ) + ( ) + ( ) (3.6)
( ) = ( ) + ( )

où et représentent respectivement les perturbations
sur le modèle d'évolution et les bruits de mesures sur . Ils sont
supposés être blancs centrés. Il vient alors :

[ ] = 0, [ ] = 0 (3.7)


Nous introduisant alors les matrices de variance pour la variance
du bruit d'état et pour
la variance du bruit de mesure, et la matrice de covariance pour
la corrélation entre les


:
bruits d'état ( ) et de mesures ( )

=
( ) = [ ] = ~ 0 , ( ) = [ ] = ~ 0 ( , ) = [ ]

39
Avec [...] l'opérateur espérance
mathématique.

On note aussi = la matrice de covariance du bruit
d'état.

Le problème de commande LQG est de déterminer la
loi de commande optimale *( ) qui minimise le critère suivant :
1
= Iim
-*8
( + ) (3.8)
Avec ~ 0 > 0
3.3.2. Synthèse d'une commande LQG [13]

La solution de ce problème est connue sous le nom du
théorème de séparation. Ce théorème
établit que la commande optimale est obtenue :
1. En recherchant l'estimé de soit de telle sorte que :
{[ ( ) - )] [ ( ) - )]}
est minimale. L'estimateur d'état optimal est donner par
le filtre de Kalman (il est
indépendant de et ).
2. En employant cet estimé pour résoudre le
problème de commande optimale linéaire
déterministe dans le cas de la régulation
(méthode LQR), c'est-à-dire et sont ignorés.

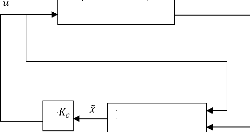
Ainsi, le problème de la commande LQG et sa solution
peuvent être séparés en deux étapes distinctes,
comme le montre la figure suivante :
-
Système
Filtre de Kalman

( ) ( )
Figure 3.2 - Théorème de séparation

Où = - Le contrôle est donc proportionnel à
l'estimateur d'état du système.
| 

