Introduction Générale
., d'une part, pour éviter aux êtres humains des
tâches répétitives, et d'autre part, pour améliorer
la productivité [Poi96]. Nous pouvons distinguer deux types de
robots:
-Les bras manipulateurs -Les robots mobiles
Historiquement, les bras manipulateurs ont été
les premiers à avoir vu le jour; ils ont représenté
pendant longtemps un mécanisme articulé de grande taille,
fixé sur un socle rigide, et assurant des tâches précises,
selon des ordres donnés; le but de leurs utilisation était
d'affranchir l'être humain de tâches lassantes et monotones, ils
évoluaient dans des milieux industriels où l'environnement est
structuré; de ce fait, leur utilisation dans ce cadre s'est
progressivement banalisée, puisqu'ils sont limités par leurs
dimensions, ainsi que leur morphologie, ne leur permettant d'opérer que
dans des espaces réduits, révélant leur incapacité
à effectuer correctement des tâches dans des
périmètres importants comparés à leurs taille. Les
domaines d'applications dans la robotique s'étant étendus, et
pour palier aux défauts des bras manipulateurs, il a fallu construire
d'autres systèmes, capables d'évoluer dans de plus grands
espaces. C'est la raison pour laquelle il y a eu l'apparition des plateformes
mobiles pour combler les lacunes des bras manipulateurs, puisqu'ils peuvent
évoluer dans de grands espaces. Ce sont des dispositifs qui sont
généralement constitués d'un véhicule semblable
à un chariot motorisé, ils peuvent être dotés de
divers outils de locomotion. On peut citer les mobiles à roues, les
mobiles à chenilles, les mobiles marcheurs ou encore les robots
rampants. Les plateformes mobiles ont été utilisées pour
transporter des charges en milieux industriels, ou dotées de divers
outils pour une plus vaste utilisation (nettoyage, exploration ou
surveillance,... etc.). L'inconvénient majeur que présentent ces
mécanismes est leur incapacité à interagir avec
l'environnement pour modifier sa structure. Le progrès et
l'évolution ont fait diversifier les domaines d'applications, les
chercheurs ont dû être confrontés à des situations
où la locomotion et la manipulation se devaient d'être
combinées, pour effectuer des tâches bien précises, ce qui
a donné naissance aux manipulateurs mobiles. Classiquement, ce sont des
plateformes mobiles portant un bras manipulateur; l'alliance de la locomotion
et de la manipulation ouvre de nouveaux horizons dans le domaine de la
recherche, puisque ces systèmes mécaniques ont été
sujets à de récentes études [Bay01]. Comme le bras est
doté de la capacité de manipulation, il peut interagir avec
l'environnement dans des espaces relativement importants, car, grâce
à la plateforme mobile, l'espace des positions accessibles du robot
manipulateur est plus important, d'où la possibilité de
franchissement d'obstacles, et même, de les déplacer quand il y a
possibilité de le faire.
Présentation d'un système de manipulation
mobile
Comme tout système robotique, les déplacements
d'un manipulateur mobile doivent être régis par un certain nombre
de lois représentatives de son évolution spatiale et temporelle.
Ces règles se présentent sous forme de modèles
mathématiques appelés modèles géométrique et
cinématique, modèles qui peuvent être utilisés dans
le cadre d'une planification de trajectoire et de mouvement, qui sont
étroitement liés à la morphologie d'un bras manipulateur
ayant une base figée non déplaçable. Or, l'adjonction de
la plateforme mobile présente un problème pour leur mise en
oeuvre, puisque l'évolution spatiale des systèmes combinés
se fait dans un environnement ayant un volume important, et l'extrapolation sur
les déplacements du système de manipulation mobile sera moins
certaine.
Notre travail consistera précisément à
mettre en oeuvre une stratégie de planification de trajectoire et de
mouvement pour un manipulateur mobile, comportant un bras manipulateur
redondant et une plateforme mobile de type voiture. Nous nous baserons sur la
constitution des différents modèles, dans le cadre de
l'accomplissement d'une tâche particulière.
Notre mémoire se subdivisera donc en cinq parties :
nous exposerons dans la première partie les différentes
caractéristiques propres à chacun des sous-système bras
manipulateur et plateforme mobile composant le manipulateur mobile, ensuite,
nous présenterons les différents travaux existants traitant de
l'étude des systèmes de manipulation mobile, puis, nous
définirons des notions fondamentales liées aux systèmes
articulés embarqués. La quatrième partie sera
consacrée à la présentation du fond du travail que nous
devons implémenter, et dans laquelle nous allons expliciter les
différentes approches que nous avons adopté pour
l'élaboration de la stratégie de planification de trajectoire et
de mouvement. Enfin, une dernière partie sera consacrée à
la mise en pratique des notions théoriques présentées dans
les parties précédentes.
Nous clôturerons ce mémoire par une conclusion, dans
laquelle nous présenterons des suggestions, dans un but
d'amélioration du travail considéré.
|
|
Chapitre I
|
|
Généralités sur les
robots
|
|
mobiles et les bras
|
|
manipulateurs
|
|
|
I.1. Introduction
Les manipulateurs mobiles sont constitués d'un ou
plusieurs bras manipulateurs embarqués sur un robot assurant la
mobilité. Pour notre part, nous nous sommes intéressés au
cas où il n' y a qu'un seul bras manipulateur embarqué sur une
plateforme mobile à roues. La spécificité de ce type de
systèmes est le fait que les bras ont des caractéristiques
particulières, relativement à leurs composantes mécaniques
et électroniques. Il en est de même pour les robots mobiles qui se
distinguent par leurs propres éléments. De ce fait, nous avons
trouvé nécessaire de décrire les deux sous
systèmes, sachant que ce sont ceux qui ont suscité le plus
l'intérêt de la recherche dans le domaine de la robotique. Il
existe donc un certain nombre de notions auxquels nous devons faire allusion ;
c'est pour cela que nous avons trouvé obligatoire de les définir,
afin de les évoquer par la suite en ayant une connaissance a priori de
leurs significations.
Ce chapitre a pour but de donner des notions essentielles sur
notre système, pour faciliter la compréhension de certains
critères. Une première partie sera consacrée à des
définitions générales liées à la robotique.
Vu que notre robot comporte le sous systèmes véhicule à
roue, nous passerons alors en revue certaines notions liées à la
robotique mobile, à savoir les roue variées utilisées pour
ce genre de systèmes, et les types de véhicules mobiles les plus
courants, et aussi, les divers capteurs utiles à la navigation. Nous
consacrerons une troisième partie aux bras manipulateurs, qui seront
décrits relativement à leurs constituants articulaires. Nous
exposerons ensuite les types de morphologies qu'ils peuvent présenter,
puis, nous définirons les divers capteurs utilisés pour ces
robots. Enfin, un dernier volet traitera de l'autonomie des systèmes
robotiques, puisque c'est un aspect qui touche au domaine de la manipulation
mobile.
Nous allons dans ce qui suit donner des définitions
générales liées à la robotique.
I.2. Définitions
Générales
I.2.1. Définition d'un robot
La définition générique stipule qu'un
Robot est une machine physique qui modifie matériellement son
environnement pour atteindre le but qui lui est fixé : la tâche
désirée [Dom01], ou encore, c'est un manipulateur commandé
en position, reprogrammable, polyvalent, capable de manipuler des
matériaux, des pièces, des outils ou des dispositifs
spécialisés [Khl99]. Cette définition s'attache de trop
prés aux systèmes articulés. Il existe une autre
définition plus générale qui considère un robot
comme un «agent» artificiel, actif et autonome, ayant comme
environnement l'espace physique.
Un agent est une entité équipée de la
capacité de perception, saisissant son entourage grâce à
des capteurs, prenant des décisions à l'aide du
contrôleur, et enfin agissant en conséquence en usant des
effecteurs ; il peut donc s'adapter seul aux variations de son
environnement, de telle sorte que la tâche soit
correctement exécutée en dépit de ces variations ; il doit
comprendre un «corps» et un «cerveau».
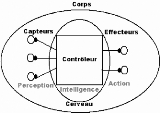
Fig.I.1 : Représentation schématique d'un
agent
Les actionneurs et effecteurs sont les organes
du robot qui animent la structure mécanique ; la maîtrise de leurs
commandes permet de faire réaliser des tâches
prédéfinies par l'opérateur. Nous allons dans ce qui suit
donner certaines définitions fondamentales.
I.2.2. Contrôle
C'est une opération qui consiste à asservir les
variables relatives au mouvement (qu'on notera x) à des valeurs
désirées (notées xd) ; par ce moyen, il est fait
en sorte que la valeur x soit commandée à partir de la
valeur désirée [Vib87] et que l'on ait en fin de compte
x=xd. En d'autres termes, le contrôleur
récupère l'information sensorielle (par des capteurs), prend des
décisions intelligentes par rapport aux actes à accomplir, et
effectue ces opérations en envoyant les commandes adéquates aux
actionneurs.
I.2.3. Actionneurs
Ce sont des mécanismes qui permettent à /aux
effecteur(s) d'exécuter une action, de convertir les commandes
logicielles (Software) en des mouvements physiques ; leur but primaire est de
produire assez de force pour provoquer le mouvement du robot, celle ci
représente la transformation d'une énergie source en
énergie mécanique[Khl99]. La technologie des actionneurs est
étroitement liée à l'énergie de base
utilisée (pneumatique, hydraulique, électrique) [Pru88].
I.2.4. Effecteurs
Ce sont tous les mécanismes à travers lesquels le
robot peut effectuer des changements propres à lui, ou relatifs à
l'environnement ; ces changements se font grâce aux actionneurs.
I.2.5. Capteurs
Ce sont des outils de perception qui permettent de
gérer les relations entre le robot et son environnement. Il existe deux
types de capteurs tels que : les capteurs proprioceptifs qui mesurent
l'état mécanique interne du robot (comme les capteurs de
position, de vitesse ou d'accélération), et les capteurs
extéroceptifs qui recueillent des informations sur l'environnement
(comme la détection de présence, mesure de distance... etc). Les
capteurs ont comme fonction de lire les variables relativement au mouvement du
robot pour permettre un contrôle convenable [Khl99].
Après avoir exposé les différentes
définitions relatives aux robots en général, nous allons
dans ce qui suit nous intéresser spécialement aux deux parties
composant des manipulateurs mobiles, à savoir, les structures
articulées (bras manipulateurs), et les plateformes mobiles.
I.3. Robot mobile
De manière générale, on regroupe sous
l'appellation robots mobiles l'ensemble des robots à base
mobile (Fig.I.2).
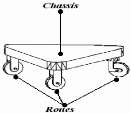
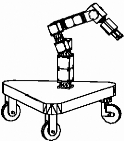
Fig.I.2 : Représentation d'un robot
mobile
Ces machines sont constituées d'un châssis, et
d'un ensemble de roues, ayant comme fonction la stabilité et la
mobilité du système (nous n'allons nous intéresser qu'aux
robots mobiles à roues, en faisant abstraction des autres types de
plateformes, comme les robots marcheurs, ou rampants).
La particularité de ces robots est leur capacité
à se mouvoir dans des environnements relativement grands (sans influer
sur leur constitution), grâce à leur système de locomotion,
c'est pour cela que nous allons dans ce qui suit évoquer les
différents types de roues utilisées en robotique mobile.
I.3.1. Types de roues
Pour une base mobile, le type de roues assurant sa locomotion a
son importance, dans le cadre de l'étude de son mouvement. Nous allons
donner une description de ces dispositifs qui
représentent la partie la plus importante, puisqu c'est
leur actionnement qui doit être commandé et contrôlé.
Les différents types de roues sont (Fig.I.3) :
(a).Roues fixes : Ont comme particularité un axe de
rotation parallèle au sol, et qui passe par le centre de la roue.
(b).Roues centrées orientables : l'axe d'orientation est
perpendiculaire au sol, il passe par le centre de la roue.
(c).Roues décentrées orientables : l'axe
d'orientation est perpendiculaire au sol, il ne passe pas par le centre de la
roue, ce type de roues est appelé aussi roues folles. Ce sont des roues
dont la direction peut varier librement selon un axe vertical. Elles
présentent l'avantage de donner au robot la possibilité de
tourner à droite ou à gauche sans « mécanique
compliquée », ou encor de simplifier la commande de la «
droite » ou de la « gauche » en jouant uniquement sur les roues
motrices arrière.
(d).Roues suédoises : pour lesquelles la composante
nulle de la vitesse de glissement, au point de contact (notions définie
dans Chapitre III, Paragraphe III.8), n'est pas dans le plan de la roue.

(a) (b) (c) (d)
Fig.I.3 : Différents types de roues en robotique
mobile : (a)Roue fixe, (b) Roue centrée orientable,
(c) Roue
décentrée orientable, (d) Roue suédoise
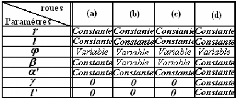
Tab.I.1 : Propriétés des
paramètres de description des roues en fonction de leurs
type
Le tableau Tab.I. 1 représente les paramètres
relatifs aux différentes roues présentées en Fig.I.4.
? représente le vecteur de rotation propre de la roue
considérée, â décrit son orientation,
r est son rayon, á` définit l'orientation de
l'axe de la roue relativement à un repère lié à la
plateforme, et enfin, l indique la distance entre le centre
d'orientation de la roue et le point référentiel
Op du chariot. Les paramètres ã et
l, sont des données qui concernent les roues
suédoises.

(a) (b)
Fig.I.4 : Description des paramètres relatifs
aux différentes roues
(a) Paramétrage pour les roues
décentrées et orientables
(b) Paramétrage pour les
roues fixes, centrées orientables et suédoises
Les roues présentées ci-dessus en Fig.I.3
[Pad05] [Bay01] influent sur le mouvement d'une plateforme mobile de part la
variabilité des paramètres qui les représentent (Fig.I.4).
Leur évocation nous ramène à l'aspect holonomie, cette
caractéristique va être explicitée dans ce qui suit.
I.3.2. Holonomie
Un système mobile holonome peut se déplacer dans
toutes les directions depuis sa position courante. La contrainte non holonome
est la limitation des vitesses admissibles d'un objet, ce qui veut dire que le
robot non holonome ne peut effectuer de mouvement instantanément que
dans certaines directions. Cette notion sera plus approfondie dans le chapitre
III.
Nous allons dans ce qui suit présenter les
différentes plateformes mobiles existantes, en évoquant
précisément l'aspect holonomie.
| 
