Le modèle cinématique inverse consiste à
trouver un mouvement généralisé pour une Tâche
à Mouvement Opérationnel Imposé. Pour un manipulateur
mobile évoluant dans un espace tridimensionnel, le modèle
cinématique inverse consiste à imposer les vitesses dans
l'espace Opérationnel [ ]T
A & = A & 1 A & 2 A
& 3 A & 4 A & 5 A & 6
dans le but d'aboutir à des vitesses
généralisées [ ]T
q & cfg = q & b1 . . . q
& bn X & P Y & P á &
comme cela est présenté en Fig.IV.1 6.
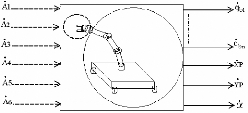
FigIV.16. Modèle cinématique
inverse
Pour le système que nous allons étudier, il
comporte une particularité, puisque la taille du vecteur des vitesses
opérationnelles [ ]T
A & = A & 1 A &
2 & A 3 qui sont en entrée est
inférieure à la taille du vecteur des vitesses
généralisées q& cgf = [ q
& b1 q & b2 q & b3 q & b4
ç p ] qui sont en sortie.
La figure suivante schématise le modèle
cinématique inverse du bras manipulateur Mitsubishi PA10 7CE,
embarqué sur une plateforme mobile non holonome de type voiture.
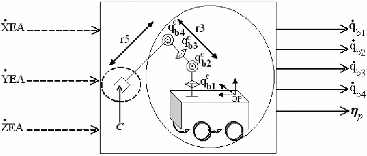
Fig.IV.17.Modèle cinématique du
système à étudier
Dans le cadre de notre étude, le modèle
cinématique inverse va être calculé relativement au
modèle géométrique inverse. Un échantillon
C quelconque va être considéré relativement
à ses coordonnées en position [Xc Yc
Zc]T, ainsi que ses vitesses opérationnelles
[X& c Y& c Z & c ]T
selon les direction des trois axes xrA,
yrA et zrA. C va être
représenté par le vecteur [Xc Yc
Z
c X & c Y & c Z & c ]T .
Pour pouvoir calculer le modèle cinématique inverse du
système considéré, il
nous faut inverser le
modèle géométrique, de sorte à atteindre les
coordonnées opérationnelles
c c
[Xc Yc
Zc]T, pour accéder à la configuration
c c
qcgf =[ q b1 q q q X Y á
]T . Grâce à
c c c c
b2 b 3 b 4 P P
cette configuration, nous calculerons la matrice jacobienne
réduite c
J illustrée en équation
(4.27).
Finalement, pour atteindre les vitesses
généralisées c
q& cgf =[c
q & b1 q & q & q
& ç ]T en imposant c c c c
b 2 b 3 b 4 p
les vitesses opérationnelles [X& c
Y& c Z & c ]T de l'échantillon C,
il nous faut inverser la matrice jacobienne c
J propre à c
qcgf
· Problématique
La matrice jacobienne réduite résultante
exprimée en équation (4.27) comporte un nombre de lignes
égal à 3 et un nombre de colonnes égal à 5.
Dans un cadre général, pour une configuration
régulière, un système redondant cinématiquement
comporte une matrice jacobienne J ayant (u lignes x
í colonnes), avec u inférieure à
í (u <í).
Le système est présenté symboliquement par
:
?
?
?
??
A 1
& 1 11 1
1 J J
... í 1 q &
? ? ? ?
: = : ... : :
? ? ? ?
A & u q
? ? ? ?
]u uí í
? J J &
1 ... ]
1 44 2 44 3
J
Et son modèle inverse sera donc :
?
?
?
??
1
?
?
?
]
q 1
? ... ? &
1 1 ? A
1
? ? ? ?
(4.29)
: = : . . . : :
? ? ? ?
q í A u
? ? ? ] ? &
] 1 42 43
? ? ... ? ?
- 1
J
Nous pourrons remarquer que pour le cas de figure
présenté dans cette partie, la matrice jacobienne réduite
J n'est pas carrée, ce qui rend délicat son
procédé d'inversion.
· Solution
Une méthode d'inversion du modèle
cinématique consiste à imposer des contraintes en vitesses au
système, pour que ça devienne un système de Cramer [Fou98]
avec une jacobienne réduite carrée apte à être
inversée.
La méthode en question est appelée «
méthode des tâches additionnelles » ; nous allons
dans ce qui suit expliciter le principe de ce procédé, en nous
ramenant au cas particulier de notre système.


