I.3.4.1. Capteurs proprioceptifs
> L'odométrie qui permet d'estimer le
déplacement à partir de la mesure de rotation des roues.
> Le radar doppler (petit radar pointé vers le sol) qui
permet de mesurer la vitesse du véhicule par effet doppler.
> Le gyromètre qui sert à mesurer l'orientation
du corps sur lequel il est placé, ceci par rapport un
référentiel fixe et selon un ou deux axes.
I.3.4.2. Capteurs extéroceptifs
> Les télémètres qui permettent de
mesurer la distance à l'environnement ; ils sont [Fil05]:
· à ultrasons, utilisant la mesure du temps de
retour d'une onde sonore réfléchie par les obstacles pour estimer
la distance.
· à infrarouge, constitué d'un ensemble
émetteur/récepteur utilisant des radiations invisibles pour la
détection d'obstacles.
· Laser, utilisant un faisceau laser et mesurant le temps
de vol d'une impulsion émise par une diode laser à faible
puissance.
> Les balises dont on connaît la position, et qui
pourraient être détectées par le robot, afin de faciliter
sa localisation.
> Le GPS (Global Positionning System) qui a comme principe
d'avoir placé des balises sur des satellites en orbite terrestre, et qui
est par conséquent accessible de quasiment partout de la surface du
globe.
Nous avons dans ce paragraphe largement décrit les
plateformes mobiles à roues par rapport à leurs
caractéristiques propres. Nous allons dans ce qui suit évoquer
les particularités de l'autre type de robots, à savoir les bras
manipulateurs, puisqu'ils représentent la seconde partie composant les
manipulateurs mobiles.
I.4. Robot manipulateur
Nous n'allons considérer que les robots manipulateurs
ayant une structure ouverte simple (en omettant d'étudier les structures
fermées, arborescentes ou parallèles), car c'est ce type de bras
qui sera utilisé de notre manipulateur mobile.
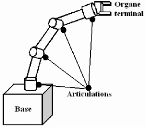
Fig.I.9 : Représentation d'un bras
manipulateur
Un bras manipulateur est un système
électromécanique capable d'interagir avec son environnement. Il
est constitué de deux parties distinctes [Khl99]:
o Un organe terminal : c'est
un dispositif d'interaction fixé à l'extrémité
mobile de la structure mécanique, il regroupe les procédés
destinés à manipuler des objets, ou à les transformer, il
s'agit donc d'une interface permettant au robot d'interagir avec son
environnement.
o Une structure mécanique articulée
: C'est une chaîne cinématique, à corps
généralement rigides (segments), assemblés par des
liaisons (articulations).
Les articulations sont des dispositifs se trouvant entre deux
segments. Ils lient deux corps successifs ; cette disposition permet le
mouvement entre ces corps, ce qui a comme conséquence l'obtention d'un
mouvement relatif des segments voisins. Cette structure articulée
supporte l'organe terminal à situer, son rôle est de l'amener
à une position et une orientation donnée.
I.4.1. Types d'articulations (liaisons) I.4.1.1.
Articulation rotoîde
C'est une articulation de type pivot, ayant comme principe la
réduction du mouvement entre deux corps à une rotation autour
d'un axe qui leurs est commun, ce qui donne comme résultante un angle de
rotation autour de cet axe.

| 

