I.4.1.2. Articulation prismatique
C'est une articulation de type glissière,
réduisant le mouvement entre corps à une translation le long d'un
axe commun, ce qui signifie qu'il se produira un déplacement
linéaire mesuré par une distance le long de cet axe.
Rotation Translation
Segment1 Segment2 Segment1 Segment2
(a) (b)
Fig.I.10 : présentation des types de liaisons :
(a) liaison rotoîde (b) liaison prismatique
I.4.2. Espace de travail
Appelé aussi volume de travail, il représente
l'espace physique engendré par un point de l'organe terminal lorsque le
robot est en mouvement (évolution relative aux variables articulaires).
Il est habituellement représenté par deux sections
perpendiculaires choisies en fonction du type du robot manipulateur [Gor84].
Cette représentation est préférable à une seule vue
en perspective. Ce point pourrait être l'extrémité de
l'organe terminal.
Ce type de représentation ne renseigne que sur les
positions de l'organe terminal, mais omet le fait d'indiquer ses orientations,
qui ne peuvent paraître concrètement.

(a)
(b) (c)
Fig.I.16 : Exemple de représentation de l'espace
de travail : (a) bras industriel IRB 1400,
(b) vue de profil,
(c) vue de haut
Avant d'entamer la description des capteurs propres aux bras
manipulateurs, nous allons évoquer un aspect très important qui
est la notion de degrés de liberté.
I.4.3. Degrés de liberté
Le degré de liberté d'un robot manipulateur est
égal au nombre de paramètres indépendants qui fixent la
situation de l'organe terminal, il peut être fonction de la configuration
du robot[Gor84]. Cela sera illustré dans l'exemple suivant en
Fig.I.17:
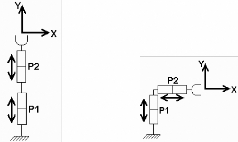
(a) (b)
Fig.1.17 : Exemple explicatif pour la définition
d'un degré de liberté : (a) bras à un degré de
liberté, (b) bras à deux degrés de
libertés
La figure Fig.I.17.a représente un bras comportant deux
liaison prismatiques, et pourtant, il est considéré comme ayant
un degré de liberté, puisque les deux liaisons font
déplacer l'organe terminal dans la direction de Y seulement ; par
contre, pour la Fig.I.17.b, le bras comporte aussi le même nombre
d'articulations, mais combinées différemment, ce qui lui permet
de faire bouger l'organe terminal dans le sens de X (grâce à
l'articulation P2) et de Y (grâce à l'articulation P1). Pour un
manipulateur mobile, un exemple concret est présenté en chapitre
III.
I.4.4. Capteurs relatifs aux bras manipulateurs
Les capteurs utilisés en manipulation sont assez
complexes à décrire car on doit faire appel à beaucoup de
notions en électricité et électronique ; c'est pour cela
que nous n'allons faire que les évoquer relativement à leurs
fonctions et nous abstenir de rentrer dans les détails.
| 
