I.4.4.1. Capteurs Proprioceptifs
Ces capteurs assurent un contrôle permanent du
système mécanique articulé. Ils interviennent dans les
boucles de régulation, afin de permettre à l'unité de
commande de suivre correctement, ou de modifier la trajectoire en cours, afin
qu'elle soit conforme à celle exigée par la tâche
[Pru88].
> Capteurs de position
Ce sont les capteurs qui servent à nous informer sur le
déplacement articulaire (linéaire pour les articulations
prismatiques ou angulaire pour les articulations rotoîdes), comme par
exemple, les capteurs potentiomètriques qui se basent
sur le déplacement angulaire ou linéaire d'un curseur, au niveau
d'un potentiomètre, pour définir la position courante de
l'actionneur. Chaque type d'articulation comprend ses propres types de
capteurs. Les déplacements linéaires ou angulaires se
détectent de façons différentes et distinctes.
La représentation suivante en Fig.I. 18 relate les
principaux capteurs de position pour les robots manipulateurs [Coi86].
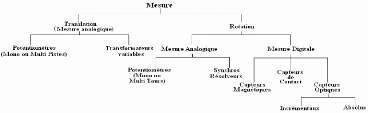
Fig.I.18: Les principaux capteurs de position
rencontrés sur les robots manipulateurs > Capteurs
de vitesse
Dans la majorité des cas, on essaie de se ramener
à la mesure d'une vitesse de rotation, car la mesure d'une vitesse de
translation nécessite des capteurs très spéciaux, peu
nombreux de toutes façons, et rarement utilisés.
> Capteurs d'accélération
Ces capteurs trouvent leurs applications dans la commande
dynamique des robots, dans le cas par exemple de désir
d'exécution de tâches à grandes vitesses.
I.4.4.2. Capteurs extéroceptifs
Les capteurs extéroceptifs sont décrits par leur
fonction plutôt que par les grandeurs qu'ils mesurent ; nous pouvons les
subdiviser en trois types tels que :
> Capteurs de contact
Ce sont des capteurs qui exigent un contact avec l'objet sur
lequel il va y avoir la mesure, leurs fonctions peuvent être diverses et
variées, comme illustré dans la figure suivante [Pru88]:
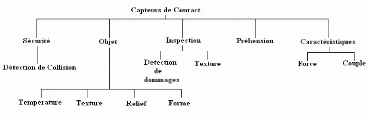
Fig.I.19 : Représentation des différentes
fonctions des capteurs à contact > Capteurs sans
contact
Ces capteurs prélèvent une information à
distance, le support de cette information est un rayonnement. Ces capteurs
peuvent se distinguer en deux familles :
· Capteurs de proximétrie :
Ces capteurs représentent une sous-classe des capteurs
sans contact. Nous pouvons les comparer à des capteurs d'images
élémentaires fournissant trois types d'informations tels que:
-une information binaire sur la présence ou l'absence
d'un objet de proximité.
-une information quantifiant la proximité de quelques
millimètres à quelques mètres. -une information
liée à la forme d'un objet à proximité.
· Capteurs d'images (Vision numérique):
Ce type de capteurs aurait pu être évoqué
dans le paragraphe précèdent, car ce sont des capteurs communs
aux deux types de robots, ce qui fait que nous avons
préféré les englober dans cette section. Ces capteurs sont
souvent utilisés en asservissement visuel, ils ont comme fonction la
perception de l'environnement par vision, il en existe cependant certaines
catégories [Fil05]:
· Les caméras standards permettant une vision
traditionnelle.
· Les caméras stéréoscopiques qui
représentent deux caméras observant la même partie de
l'environnement à partir de deux points de vue différents, ce qui
permet d'avoir une sensation de profondeur.
· Les caméras panoramiques (catadioptriques) qui
mesurent la réflexion de l'environnement, grâce à une
caméra sur un miroir parabolique. L'image recueillie permet d'avoir une
vision de l'environnement sur 360 degrés autour de la camera.
Avant de clore ce chapitre, nous allons évoquer une
caractéristique très importante, concernant les robots en
général qui est l'autonomie.
| 

