B.2. Formation de la matrice jacobienne :
Il existe plusieurs méthodes de calcul de la matrice
jacobienne, définie dans l'équation (B.5), la méthode la
plus évidente réside sur le principe de la dérivation des
équations déduites du modèle géométrique
direct, l'inconvénient de cette approche est qu'elle soit liée
à la morphologie du robot manipulateur, et que les vitesses angulaires
ne correspondent pas aux dérivées des angles de rotation
Ø, È et Ö déduites du modèle
géométrique direct [Pad05].
Les autres méthodes de calcul du modèle
cinématique direct reposent sur le calcul des influences de chaque
articulation sur l'organe terminal. Ces méthodes se caractérisent
par le repère dans lequel la matrice jacobienne est exprimée,
ainsi que par le corps auquel elle correspond; le calcul de la matrice
jacobienne s'effectue souvent relativement à l'organe terminal, elle est
généralement exprimée dans le repère de la base du
bras RB0.
B.2.1. Calcul de la matrice jacobienne vectorielle Jn
:
L `influence de la kéme
articulation, ayant comme axe de déplacement définit par le
vecteur unitaire Wk, exprimant un accroissement infinitésimal
äqbk, provoque un accroissement infinitésimal
de position, et d'orientation notés respectivement äpk et
äök sur l'organe terminal selon Fig.B. 1.
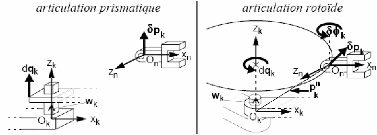
Fig.B.1 : Présentation des paramètres
äpj et äöj
Les vitesses äpk et äök sont
exprimées dans les équations suivantes (B.6 et B.7), selon le
type d'articulation provoquant le mouvement de l'organe terminal :
Liaison prismatique ? Liaison rotoïde
äpk=äqbk .Wk
äpk=(äqk .Wk )Ëp k n
(B.6) (B.7)
äök= 0
äök=äqki .Wk
Nous pouvons regrouper les équations (B.6) et (B.7) en
(B.8), pour ne considérer qu'une seule expression relative à
äpi et äöi, cette équation varie selon
le type de liaison considéré, en utilisant le paramètre
ók utile pour distinguer entre une articulation rotoïde ou
prismatique.
äpk= (ók Wk+(1-
ók) (WkËp n k ))
(B.8)
äök= (1-ók) Wk
äqk.
Sachant que : ók=0 si l'articulation 'k
courante est rotoïde, et ók=1 si l'articulation
'k est prismatique.
Nous avons représenté auparavant en
équation (B.8) l'influence de l'accroissement infinitésimal d'une
articulation sur le mouvement de l'organe terminal ; grâce au
théorème de la composition des vitesses, nous pouvons sommer les
contributions de toutes les vitesses articulaires afin de conclure sur les
vitesses linaires et angulaires de l'objet d'intérêt.
n
|
äp= ?=
k 1
n
äö= ?
k=1
|
(ók-1 Wk-1+(1- ók-1)
(Wk-1Ëp n k-1))
(1-ók-1) Wk-1 äqk-1.
|
(B.9)
|
De l'équation (B.9) nous parvenons à décrire
les colonnes de la matrice jacobienne telle que, si la liaison lk est
rotoïde, alors la ligne correspondante à l'articulation
s'écrit :
W p n
J (q ) Ë (B.10)
[ 1
k 1 k 1
- -
k W
= ?? ??
? k 1
- j
Si la liaison est prismatique, alors :
J (q ) k 1
[ W 1
k (B.11)
= -
?? 0 j
Sachant que p n k-1 représente la
position de l'organe terminal par rapport au centre du repère de
référence Ok-1 (centre du
repère numéro k-1).
Les équations (B. 10) et (B. 11) illustrent donc la
représentation de la kéme ligne de la matrice
jacobienne selon le type d'articulation considéré.
La matrice jacobienne est composées des n lignes
construites préalablement selon les
équations (B.10) et (B.1 1) Pour un bras manipulateur
à n degrés de libertés, il en résultera
donc la matrice Jb =[J1
Jn]T . cette matrice transforme les
déplacements élémentaires des
articulations en déplacements élémentaires
au niveau de l'organe terminal.
Nous allons dans ce qui suit proposer une méthode de
calcul de la jacobienne.
| 
