2.2.3 Résultats de simulation
Dans cette section, les résultats de simulation
relatifs au contrôleur proposé PIPSO pour la commande en vitesse
d'une machine synchrone à aimant permanent seront
présentés et comparés avec ceux obtenus par l'utilisation
du contrôleur conventionnel PI et des algorithmes
génétiques (PIGA) [Loukdache et al, 2007].
Les paramètres, de la MSAP étudiée dans
cette application, sont les suivants : - Résistance du stator :
Rs = 2.875 I;
- Inductance Ld = Lq =
8.5e-3H ;
- Inertie = 0.8e-3kg
· m2 ;
- Nombre de paires de pôles = 4.
L'objectif principal de cette application étant de
fournir comme entrée une vitesse de référence que la MSAP
doit asservir. Pour cela, deux cas d'exemple sont étudiés. Dans
le premier cas, la vitesse de référence est définie par un
échelon qui varie entre 200 et 700 rd/s (figure 2.4), le couple
de charge mécanique varie entre 0 et 6 N.m (figure 2.5). Pour
le deuxième cas, la vitesse de référence est
représentée par séquence répétitive de
trapézoïdes (figure 2.6), le couple de charge mécanique
étant maintenu constant durant le temps de simulation
(Tm = 4 N.m) (figure 2.7).
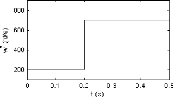
FIG. 2.4 - Vitesse de référence
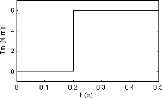
FIG. 2.5 Couple de charge mécanique
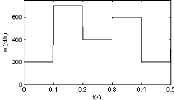
FIG. 2.6 - Vitesse de référence
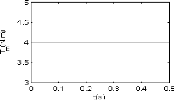
FIG. 2.7 - Couple de charge mécanique
2.2.3.1. Premier cas : Commande par échelon
Dans ce cas, la vitesse de référence et le
couple de charge mécanique sont définis par des échelons
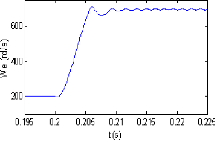
(figures 2.4 et 2.5). La figure (2.8) représente la réponse
temporelle de la machine à la vitesse de référence
utilisant les trois stratégies de commande (contrôleurs) : le PI
conventionnel (figure 2.8(a)), PIGA (figure 2.8(b)) et PIPSO (figure
2.8(c)).
La figure (2.8(a)) montre que le temps de réponse,
à la vitesse de référence utilisée, n'est pas
atteint en utilisant le contrôleur conventionnel PI. Cependant, la
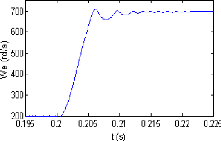
réponse temporelle relative à PIGA est obtenue à l'instant
t 0.222s (figure 2.8(b)) alors que à
l'instant t 0.21s, la réponse en vitesse est
atteinte utilisant PIPSO (figure 2.8(c)). Par conséquent, le
contrôleur PIPSO est 94% plus rapide que la stratégie de commande
PIGA.
Il est clair que la performance du contrôleur PIPSO
relative à la réponse en vitesse est meilleure que celles des
deux contrôleurs PIGA et du PI conventionnel.
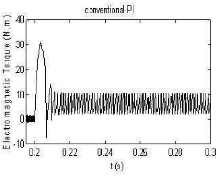
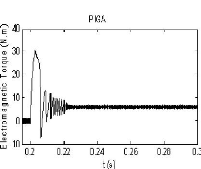
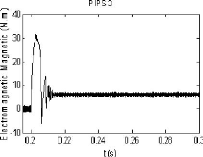
De plus, pour illustrer la performance et l'efficacité
du modèle proposé, la figure (2.9) présente la
réponse en couples électromagnétiques fournie par ces
trois contrôleurs.
La réponse en couple électromagnétique
présentée par la figure (2.9(a)), relative au contrôleur
conventionnel PI, montre que les oscillations ne sont pas
atténuées durant

(a)

(b)
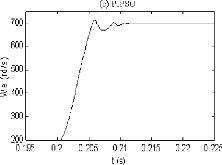
(c) FIG. 2.8 Réponse en vitesse électrique
(a)
(b)
(c) FIG. 2.9 Réponse en couple
électromagnétique
tout le temps de simulation. Dans la figure (2.9(b)), les
oscillations sont presque atténuées à l'instant t
0.221s utilisant le contrôleur PIGA, tandis
qu'avec la stratégie de commande PIPSO, ces oscillations se
réduisent à t 0.218s (figure 2.9(c)).
Dans ce cas, le rapport du temps de réponse est donné par:
PIGA/PIPSO = 101.4%.
| 

