II. La comparaison électrique de l'ARINC 429
:
Dans la plupart des systèmes digitaux binaires qu'ils
soient embarqués sur avion ou pas, les deux niveaux binaires `0' et `1'
sont représentés par deux niveaux de voltage: 0V pour le `0'
binaire et 5V pour le `1' binaire. L'écriture et la lecture des deux
niveaux de tension sont synchronisées par une horloge. Par cette
méthode un bit est clairement distingué, cependant la
transmission des données binaires sur ce bus se fait sur une paire de
fils, on utilise une méthode différente pour séparer les
bits de données.
La méthode utilisée par le bus numérique
ARINC 429 est «Bipolar return to zero ». Cette technique est
utilisée pour ne pas confondre les signaux surtout dans la transmission
série (synchronisation). (Fig. A.2)
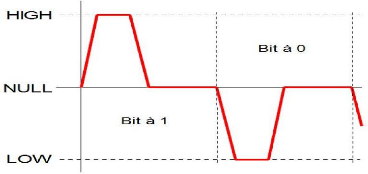
Figure A.2 : Comparaison électrique de
l'ARINC 429
Tableau A.1 : Comparaison électrique de
l'ARINC 429
Niveau
|
Côté transmetteur
|
Côté récepteur
|
HIGH
|
+10.0 V #177; 1.0 V
|
+6.5 à 13 V
|
NULL
|
0 V #177; 0.5V
|
+2.5 à -2.5 V
|
LOW
|
-10.0 V #177; 1.0 V
|
-6.5 à -13 V
|
|
III. Composition du mot numérique ARINC 429
:
L'information qui provient du bus de données ARINC 429
est un mot de 32 Bits. L'information de ce mot est partagée comme
suit:
- Bits 1-8 (Label) : Identificateur du type de
données se trouvant dans le mot.
- Bits 9-10 (SDI) : (Source/Destination
Identifier) identifie le système source ou bien le système de
destination du multi-système d'installation.
- Bits 11-28 ou 29 (Data) : contient
l'information.
- Bits 29 ou 30-31 (SSM) : (Sign Status Matrix)
identifie le signe et la direction caractéristique de la donnée
et l'état de la transmission hardware.
- Bits 32 : bit de parité. (Fig. A.3)

Figure A.3 : Bus numérique ARINC 429
ANNEXE B : Généralité sur
l'aérodynamique de l'avion
Le pilotage d'un avion consiste à :
· maintenir l'avion sur sa trajectoire, ou bien
· commander et contrôler une variation de
trajectoire, dans le plan vertical ou dans le plan horizontal.
L'avion est soumis à des forces dues aux mouvements de
l'atmosphère qui l'entoure.
· faible perturbation: le pilote laisse l'avion moyenner sa
trajectoire.
· forte perturbation: l'équilibre initial est
modifié, le pilote agit sur les gouvernes pour que l'avion revienne
à sa position initiale.
Un avion peut être représenté dans le
trièdre de référence formé par: (Fig.B.1)
· l'axe x : axe longitudinal ou axe de roulis (couleur
rouge);
· l'axe y : axe transversal ou axe de tangage (couleur
bleue) ;
· l'axe z : axe de lacet. (couleur vert).
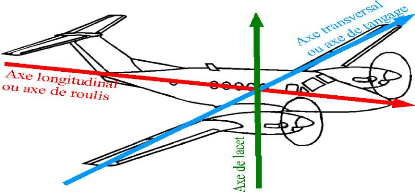
Figue B.1 : Convention d'axe en
aéronautique
Roulis : (Fig.B.2)
C'est le mouvement de rotation d'un mobile autour de son axe
longitudinal (axe de roulis). En aviation, ce mouvement est commandé par
une action latérale sur le manche.
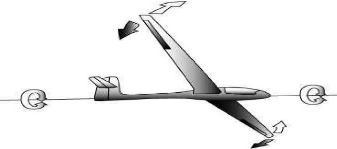
Figue B.2 : Mouvement de roulis
Tangage : (Fig.B.3)
C'est l'oscillation d'un appareil dans le sens de sa longueur,
lorsque son nez va d'avant en arrière, ou angle que forme ce dernier
au-dessus ou en dessous de l'horizon.
Pour contrôler le tangage, le pilote se sert de la
gouverne de profondeur, située sur le stabilisateur. Pour ce faire, il
pousse le manche en avant pour abaisser le nez de l'appareil et le tire en
arrière pour le relever.

Figue B.3 : Mouvement de tangage
Lacet : (Fig.B.4)
C'est le mouvement de rotation horizontal d'un mobile autour
d'un axe vertical. En aéronautique, ce mouvement est commandé par
l'action sur les palonniers.
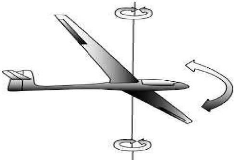
Figue B.4 : Mouvement de lacet
| 

