Chapitre I : Contexte pratique &
problématique
3.3. Classification des systèmes de pilotage
Selon les objectifs que doit atteindre le système de
pilotage et selon l'approche appliquée à ce dernier, nous pouvons
distinguer plusieurs familles ou types de systèmes
représentés ci-après.
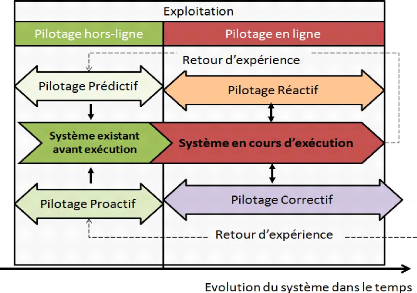
Figure 3 Différents pilotages selon le
lancement du système
PILOTAGE PREDICTIF
Le pilotage prédictif est destiné à
préparer le lancement d'un système existant. Il se fait donc
« apriori ». Il permet de définir l'objectif de la production
et la meilleure trajectoire pour y parvenir et de prendre des décisions
pour assurer le fonctionnement courant. Ce pilotage est basé sur des
paramètres (comme le temps opératoire d'une machine, le taux
d'arrivée, le taux de panne etc.) estimés de manière
déterministe (ex : le temps opératoire moyen est de 15 minutes)
ou probabiliste (ex : le temps opératoire suit une loi uniforme entre
deux valeurs minimum et maximum).
Les paramètres de pilotage sont
déterminés avant l'exécution sur le système
réel. Un expert ou un outil est chargé de trouver la meilleure
décision (ex. règle de priorité). Le pilotage
prédictif fournit en quelque sorte le scénario optimal dans un
environnement non perturbé.
17
Chapitre I : Contexte pratique &
problématique
PILOTAGE PROACTIF
Le pilotage proactif est utilisé également dans
la phase de préparation avant que le processus de production ne soit
lancé. L'objectif ici est d'anticiper un certain nombre d'aléas
et de déterminer « apriori » la meilleure réponse
possible à apporter si l'aléa survient. On va donc ainsi pouvoir
répondre très vite et être beaucoup plus réactif. Ce
pilotage est basé sur les mêmes principes que le pilotage
prédictif, mais :
1. Il consiste d'abord à anticiper les perturbations
les plus probables et le plus grand nombre possible de perturbations
éventuelles. Ces données peuvent être remontées
grâce aux indicateurs de performance d'un système
déjà existant ou bien extraites d'une base de données
mémorisant les événements passés.
2. Ensuite, il cherche à identifier les risques de ne
pas atteindre les objectifs initialement fixés, notamment de ne pas
respecter le délai prévisionnel face aux perturbations.
3. La simulation hors ligne est aussi un des outils
utilisés pour ce pilotage afin d'anticiper les perturbations et calculer
les risques éventuels de ne pas respecter l'objectif visé.
PILOTAGE REACTIF
Le pilotage réactif intervient pendant
l'exécution de la production, une fois le lancement effectué. Il
a pour but de corriger les valeurs des variables de décision lors de
l'apparition d'un événement imprévu.
Ce pilotage doit réagir en temps réel. Dans le
meilleur des cas, l'événement a été anticipé
dans la phase de pilotage proactif et la réponse est connue. Souvent,
l'événement n'a pu être anticipé. On peut distinguer
deux situations nécessitant une réaction : ou pilotage en temps
réel
i. Des événements imprévisibles peuvent
survenir, sans que l'on puisse
les anticiper par un pilotage prédictif ou proactif. Il
peut s'agir par exemple de l'arrivée d'une commande urgente, de la
modification d'une commande ou encore d'une panne sur une machine. Le pilotage
réactif devient nécessaire pour analyser les conséquences
de cet événement imprévu par rapport à l'objectif
de production et, le cas échéant, pour déterminer les
paramètres de pilotage à corriger pour minimiser l'impact de
cette perturbation (BERCHET 2000).
18
| 
