Introduction
La modélisation des manipulateurs mobiles implique une
connaissance approfondie du système considéré,
relativement aux deux parties qu'il comporte (le bras manipulateur et la
plateforme mobile). Le choix d'un robot est donc une étape très
importante, qui doit se faire en amont pour qu'il puisse accomplir correctement
les actions exigées.
Nous avons rencontré dans notre recherche des robots ayant
des caractéristiques particulières, qui nous ont permis de les
classer, afin d'avoir une idée plus claire sur la question.
Nous allons dans ce chapitre répertorier les
différents critères caractérisant les manipulateurs
mobiles. Nous citerons un certain nombre de robots réels qui sont des
plates- formes expérimentales de certains laboratoires de recherches, et
des robots spécifiques à certains domaines d'applications
seulement ; le robot que nous allons utiliser comprend certaines
caractéristiques. C'est grâce à cette étude que nous
pourrons faire le choix de notre système articulé mobile.
Ce chapitre est subdivisé en deux parties, la
première consistera en une description de manipulateurs mobiles par
rapport à l'aspect technique, car nous allons surtout les
répertorier relativement à leurs composants propres, la seconde
partie sera consacrée à une classification de robots par rapport
à leurs utilisations.
II.1. Caractéristiques des manipulateurs
mobiles
Lors de notre recherche, nous avons pu constater un certain
nombre de caractéristiques relatives aux manipulateurs mobiles comme
:
II.2.1. Capteurs utilisés et leurs positions
Les types de capteurs utilisés et leurs positions
représentent un critère important dans le choix d'un manipulateur
mobile. Ainsi, le robot ANIS, développé à l'INRIA Sophia-
Antipolis en France sert de base de recherche aux travaux du projet ICARE
(Instrumentation, Commande et Architecture des Robots Evolués). Ce robot
représente un support expérimental à des études en
commande et navigation référencées capteurs, ainsi qu'en
perception active et fusion multi capteurs.
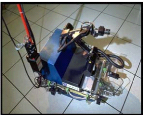
Fig.II.1 : Robot Anis
La partie mobile non holonome de type unicycle est
dotée de divers moyens sensoriels, comme le
télémètre laser rotatif qui se trouve à
l'arrière droit, ainsi qu'une ceinture de huit capteurs à
ultrasons se trouvant tout autour, lui permettant de se localiser et de se
déplacer dans des environnements d'intérieur, afin de les
explorer et d'en construire une représentation. Il est surmonté
d'un bras à 6 liaisons rotoïdes, comportant une camera au niveau de
l'organe terminal ; elle s'en trouve embarquée comme c'est
représenté en Fig.II. 1.
Ce robot est destiné à se déplacer dans un
environnement encombré, aussi, il a été conçu de
taille réduite ; il est relativement léger et maniable.
| 
