II.2.2. Redondance et holonomie
Comme nous l'avons précisé dans le chapitre I,
l'holonomie est une notion fréquemment utilisée pour les robots
mobiles afin d'exprimer l'aspect encombrement du véhicule ; par contre,
la redondance est un terme généralement employé pour
désigner la souplesse et la dextérité des bras
manipulateurs, c'est pour cela que ce sont des critères de
sélection majeurs auxquels nous nous somme intéressés ;
ces deux notions sont tout autant importantes, puisque les manipulateurs
mobiles ont la capacité de manipulation et de mobilité. Le robot
du The Robotic Laboratory Computer Science Departement (université de
Stanford aux USA) comporte une plateforme mobile holonome de type NOMADIC
XR4000, portant un bras manipulateur de type PUMA 560 à six liaisons
rotoïdes [Hol99]. Ce système a été employé
dans un projet de coopération multi robots au niveau du même
laboratoire, le projet en question ayant comme objectif la réalisation
de tâches en environnement intérieur. Chacun de ces robots est
doté de différents capteurs, un calculateur, un contrôleur
multiaxes, et une batterie comportant assez de puissance pour l'accomplissement
d'opérations autonomes [Kha96].
L'approche de collaboration de plusieurs robots a
été très souvent adoptée, comme au niveau de
l'université du Michigan aux USA dans le Robotics And Automation
Laboratory (Fig.II.2.a), où chaque bras est équipé de
capteurs d'effort (capteur de contact), ainsi qu'une pince. Les manipulateurs
mobiles sont dotés de cameras, d'un capteur laser, ou encore un
réseau Ethernet sans fil pour la communication (type de réseau
local rapide et très répandu).
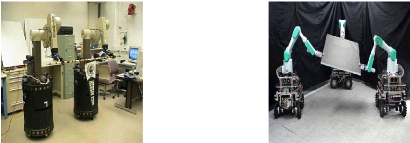
(a) (b)
Fig.II.2 : Robots coopérants : (a) manipulateurs
mobiles de Michigan,
(b) manipulateur mobile de l'université de
Tohoku
On a proposé au niveau du Korsuge et Wang laboratory de
l'université de Tohoku au Japon un algorithme de contrôle
décentralisé, pour la manipulation coordonnée d'un objet
simple géométriquement par plusieurs manipulateurs mobiles,
comprenant chacun une base mobile holonome et un bras anthropomorphe redondant
à 7 liaisons rotoïdes (Mitsubishi PA10 7C)(Fig.II.2.b).
Le robot LIAS (Leuven Intelligent Autonomous System) au niveau
du Department of Mechanical Engineering (université catholique de
leuven), comporte une plateforme non holonome de type ROBUTER
équipée de nombreux capteurs, parmi lesquels le laser rotatif et
l'odomètrie ; la manipulation est accomplie grâce au manipulateur
industriel CRS A465 (six liaisons rotoides), comprenant un capteur d'effort,
une pince, ainsi qu'une camera assurant la stéréo vision [Waa03]
comme cela est représenté en Fig.II. 3.
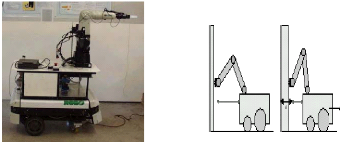
(a) (b)
Fig.II.3 : Robot LIAS : (a) Présentation
réelle du robot, (b) Tâche d'ouverture d'une porte
Ce robot (Fig.II.3) a servi de base expérimentale pour
effectuer un mouvement spécifique d'ouverture d'une porte par approche
réactive. Cette même tâche a aussi suscité
l'intérêt d'un autre laboratoire de recherche, lequel a
été original de par l'emplacement du bras, puisque nous avons pu
rencontrer plusieurs exemples de manipulateurs mobiles, et nous avons
remarqué que le bras manipulateur se trouvait généralement
sur la plateforme mobile. Il existe tout de même des cas particuliers,
comme cela est explicité ci après.
| 

