II.2.4. Nombre et position des roues motrices
Pour faire que le robot se déplace correctement en
suivant la consigne à la lettre, la position et le type de roues doivent
être connus, comme celles de la plateforme H2bis portant un manipulateur
GT6A de Robosoft (Fig.II.6.a) du Laboratoire d'Architecture et d'Analyse des
Systèmes (LAAS) du CNRS en France, qui a comme particularité
l'emplacement de ses deux roues différentielles (latérales et
située au milieu) motrices et directrices (Fig.II.6.b) ; quatre roues
libres on été placées de sorte à équilibrer
la plateforme. Les capteurs utilisés sont un codeur optique et une roue
odométrique pour chacune des roues motrices [Pad05], ainsi qu'une
ceinture de 32 capteurs à ultrasons, un telemetres laser 2D et une
camera. Ce robot a été surtout utilisé dans le cadre
d'études de la coordination plateforme/manipulateur [Fou98]. Le bras est
à 6 liaisons rotoïdes, chaque liaison comporte un codeur
incrémental, ce bras comprend aussi un capteur d'effort 6 axes
placé au bout de la chaîne cinématique (entre
l'extrémité du bras et l'organe terminal) [Pad05].
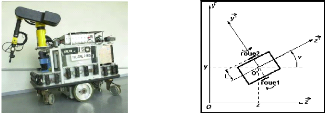
(a) (b)
Fig.II.6 : robot du LAAS/CNRS, (a) présentation
réelle du robot, (b) position des roues
II.2.5. Taille du robot
La taille des robots représente un critère de
sélection important, car dans des environnements fortement
encombrés par exemple, les petits robots peuvent être d'un grand
secours, par contre, s'il y a nécessité de transport d'objets
lourds, alors les grands robots sont très intéressants. Le Robot
M3 (Manipulateur Mobile Miniature) du Laboratoire d'Informatique,
Robotique, et de Microélectronique de Montpellier en France (LIRMM) est
un robot de petite taille. Il y a eu au départ la conception de
plateformes mobiles appelées Type1, qui étaient destinées
à être utilisées dans des travaux de coopération
multi robots, chacun d'entre ceux ci est équipé de deux roues
différentielles et d'une ceinture de capteurs à infrarouge (au
nombre de 8 capteurs), qui permet aux robots de détecter des obstacles ;
ensuite, on a conçu spécialement pour l'une de ces plateformes un
mini bras manipulateur léger, pour qu'il puisse être porté
par le petit robot mobile.
Le bras est constitué de trois moteurs qui actionnent
les deux axes, ainsi que l'organe terminal. Tous les moteurs sont fixés
sur le châssis ; la transmission est réalisée grâce
à des poulies, des courroies, et un câble. Ce type de construction
permet d'alléger le poids appliqué sur les axes du bras et
d'obtenir ainsi une dynamique particulièrement performante (aucun moteur
ne doit supporter le poids d'un autre actionneur) [Luc03].
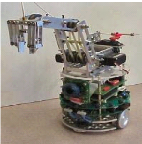
Fig.II.8 : Robot Manipulateur mobile miniature
M3
A l'inverse de M3, il peut exister des robots
gigantesques pour des opérations qui doivent s'effectuer en hauteur, et
pour lesquels un poids assez important pourrait être soulevé,
comme le manipulateur mobile appelé Nadep Jax mobile manipulator
(Fig.II.9). C'est un robot conçu spécifiquement pour des travaux
de rénovation d'avions (ça nous donne une idée sur la
taille du robot) ; ce projet a été financé par la U.S.Navy
(corps de l'armée américaine). Il a une excellente
dextérité pour manoeuvrer et se positionner autour de l'avion. De
son emplacement, les axes du manipulateur peuvent atteindre des positions assez
éloignées sur l'avion, pour exécuter des tâches
d'inspection ou d'application d'enduit par exemple. Le système inclut
une plateforme mobile omnidirectionnelle comportant quatre roues à
actionnement hydraulique, avec un axe pour soulever la structure (comme un
ascenseur), sur laquelle est placé un bras manipulateur à six
axes. Un opérateur humain positionne la plateforme parallèlement
à l'avion, et actionne l'ascenseur pour permettre au système
articulé d'atteindre des positions se trouvant au-dessus de l'avion, ou
au-dessous. Des capteurs laser fournissent une information de retour pour un
contrôle adaptatif dans le but de suivre la surface, en maintenant une
distance prédéfinie. Quand la surface est complètement
traitée, l'ascenseur ou la plateforme est repositionnée, pour
entamer une autre surface. Ce type de système peut rénover un
avion (de type P-3 Orion ASW) à 90% en moins de 120 heures [Swi03].

Fig.II.9 : Robot Nadep Jax Mobile
manipulator
Nous avons pu constater que les robots de grande taille
comportaient des plateformes
omnidirectionnelles, ce qui implique que c'est
un critère de choix important car, ajouter une
plateforme non holonome à un robot gigantesque rendrait la
tâche encore plus complexe à réaliser.
| 
