II.2.6. Mode de Manipulation
Dans des définitions classiques des manipulateurs
mobiles, la locomotion est assurée par un véhicule, et la partie
manipulation se fait grâce à un ou plusieurs bras
articulés, sauf, qu'il existe un cas particulier où ce sont les
roues qui effectuent la tâche de manipulation. C'est un projet assez
original, le robot s'appelle Mobipulator (Carnegie Mellon University aux Etats
Unis) [Mas01]. Ce projet a comme but de parvenir à accomplir des
tâches se focalisant principalement sur l'habileté de manipuler
des documents et autres objets de bureau. Ce robot pourrait être
branché sur un ordinateur aussi facilement qu'une camera ou un CD ROM
(Fig.II. 10). Les moteurs, les capteurs, et les composants électriques
utilisés sont de petite taille, ce qui a permis de construire un
système robotique pratique et utile dans un environnement de bureau.
Le but du Mobipulator est d'explorer l'idée d'utilisation
de roues à des fins de manipulation. Le Mobipulator ressemble à
un petit chariot (10cm*10cm), avec quatre roues motrices indépendamment
actionnées (aucune d'entre elles n'est directrice).
Différents modes de locomotion ont été
envisagés par rapport à la tâche à accomplir,
qu'elle soit de manipulation seulement ou de locomotion grâce au seul
mouvement des roues.
Puisque la fonction de ce robot est de mettre de l'ordre à
la demande, les chercheurs ont commencé par exiger de lui d'accomplir
des tâches primaires.
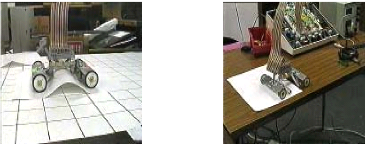
Fig.II.10 : Robot Mobipulator
Une des tâches évoquées
précédemment est le fait de déplacer un morceau de papier.
Pour cela, il roule dessus, ensuite, il utilise ses roues avant pour le
manipuler, pendant qu'il use en même temps des roues arrières pour
la tâche de locomotion. L'autre fonction exigée est de manipuler
un cylindre, il doit placer ses roues avant dessus, ensuite, il les fait
tourner vers l'arrière, comme un être humain qui fait rouler un
baril.
Le fait d'avoir un tel système en environnement de bureau
peut représenter un certain nombre d'avantages, car il est peu
encombrant grâce à sa la taille réduite, peu coûteux,
et discret.
La conception de ce type de système présente
tout de même des imperfections telles que : il lui est difficile de
naviguer à travers des terrains rugueux, et la manipulation d'objet
même simple présente toujours un challenge.
Nous avons illustré précédemment des
caractéristiques particulières relatives à des
manipulateurs mobiles. Nous allons évoquer dans ce qui suit des domaines
dans lesquels la combinaison de la locomotion et de la manipulation a fait ses
preuves.
II.3. Domaines d'applications
La curiosité de l'être humain lui a permis de
parvenir à atteindre les fins fonds de l'espace, ou les grandes
profondeurs sous marines. Ces milieux peuvent représenter des dangers.
La solution primaire est d'envoyer des robots capables de faire face à
ces risques.
| 
