II.3.3. Domaine médical
Dans le même registre d'aide aux personnes, le robot
Helpmate (Fig.II. 13) du Intelligent Robotics Laboratory de l'université
de Vanderbilt a été conçu dans le but de remplir des
missions en milieu hospitalier où à domicile.
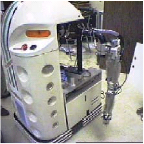
Fig.II.13 : Robot Halpmate.
Helpmate est une plateforme mobile à roues
différentielles comportant des capteurs à
ultrasons sur le
coté et à l'avant, montés sur un panneau vertical. Un
système de vision basé
sur une camera à quatre degrés de libertés
se trouve à l'avant de la plateforme (The Costeffective Active Camera
Head (CATCH) est une camera).
Le manipulateur à 5 axes est monté sur le
coté gauche de la plateforme, l'espace de travail se trouve de ce fait
du coté gauche. Ce système doit permettre une autonomie aux
personnes handicapées, puisque le bras manipulateur porte une
caméra, ainsi que des capteurs vocaux et tactiles [Pac03].
II.3.4. Domaine manufacturier
Le robot Kamro (Fig.II. 14) du Institute for Real-time
Computer Systems And Robotics de l'université de Karlsruhe en Allemagne,
qui est destiné à des tâches autonomes en environnement
industriel, est constitué d'une plateforme mobile omnidirectionnelle lui
permettant une grande facilité de mouvement, dotée de capteurs
à ultrason, et de deux bras PUMA 200 équipés de capteurs
d'effort six axes, ainsi que deux caméras se trouvant sur chacun des
organes terminaux [Lae97].

Fig.II.14: Robot Kamro
II.3.5. Les humanoïdes
Nous n'allions pas terminer notre état de l'art sans
évoquer les humanoïdes, qui représentent un domaine
fascinent, puisqu'ils s'inspirent des êtres humains pour effectuer leurs
tâches; ils peuvent être considérés comme des
manipulateurs mobiles par excellence.

(a) (b)
Fig.II.15 : Robots Humanoïdes : (a) robot ASIMO de
Honda, (b) robot de l'université de Cornell
Le robot Asimo de Honda au Japon (Fig.II.15.a) est à la
pointe de la technologie, puisqu'il évolue de plus en plus, avec ses 34
degrés de liberté. Il a réussi entre autres à
courir de façon quasi humaine, son mouvement autonome et continu lui
autorise le choix de son itinéraire ; et enfin, des fonctions visuelles
et de préhension améliorées lui permettent des
interactions intelligentes avec son entourage. Son seul inconvénient,
est qu'il consomme beaucoup d'énergie.
Le robot de l'université de Cornell (USA) parvient
quand à lui à reproduire quasi parfaitement le mécanisme
de la marche humaine en consommant très peu d'énergie (10 fois
moins qu'Asimo). Les progrès accomplis dans ce domaine depuis quelques
années sont vraiment spectaculaires.
Nous avons pu remarquer que nous n'avons
présenté que des références de robots
américains, européens ou asiatiques, mais pas africains, vu que
la recherche demande beaucoup de moyens, sauf que récemment, il y a eu
la réception d'un manipulateur mobile au niveau du laboratoire de
robotique du centre de développement des techniques appliquées
(CDTA) en Algérie, comportant une plateforme mobile (ROBUTER de
Robosoft) non holonome comprenant 24 paires de capteurs à ultrason;
quatre roues portant le véhicule dont une paire représentant des
roues folles et les autres sont des roues différentielles. Un bras
à six liaisons rotoïdes se trouve juste au dessus de ces
dernières. Il est doté d'un capteur d'effort et d'une
caméra se trouvant au niveau de l'organe terminal qui est une pince.
L'ordinateur de bord se trouve embarqué sur la plateforme. Auparavant,
les expériences sur des manipulateurs mobiles ne se faisaient que par
simulations où l'environnement est virtuel, mais dorénavant,
elles pourront enfin se concrétiser puisque la détention d'un
robot facilite la tache aux chercheurs, qui ont une référence
réelle et pourront de ce fait passer à la phase de
réalisation.

Fig.II.16 : Manipulateur mobile du CDTA
Nous avons eu une vaste idée de travaux qui se
faisaient par rapport aux robots accordant manipulation et locomotion, ce qui
prouve l'efficacité de ces processus, et leurs débuts d'extension
dans de divers domaines.
| 

