III.7. Notions de redondances
III.7.1. Notions de redondance
géométrique
La notion de redondance géométrique exprime le
fait que le nombre de coordonnées généralisées
í est strictement supérieur au degré de
liberté (global) u de l'OT. L'ordre de redondance
géométrique est égal à í-u
La notion de redondance géométrique signifie que
pour une situation donnée de l'OT, il existe une
infinité de configurations du système ; il est donc
considéré comme géométriquement redondant si
u<í; l'ordre de cette redondance
géométrique étant í-u. Par contre, si
u=í, le système mécanique n'est pas
géométriquement redondant, alors que la condition
u>í s'avère impossible.
Dans des conditions de redondance géométrique,
le modèle géométrique inverse présente une
infinité de solutions. Son étude peut être utile en
planification de mouvement, même si elle s'avère peu indicatrice
de l'état de la cinématique du système.
III.7.2. Notions de redondance cinématique
Cette notion n'est considérée que pour des
systèmes non holonomes, car, dans le cas de systèmes holonomes
(tels que les bras manipulateurs usuels par exemple), l'indice de
mobilité et le degré de liberté s'en trouvent confondus ;
de ce fait, redondance géométrique et cinématique sont une
seule et même notion.
La dimension du noyau de l'application J(q)
considérée (en une configuration de
redondance différentielle q) est liée
à la redondance du système, puisqu'elle présente l'ordre
de cette redondance. Par conséquent, cette notion est
présentée par le fait que le degré de mobilité du
système soit supérieur à son degré de
liberté (Ddm-u >0). Pratiquement, la
notion de redondance cinématique exprime le fait qu'il existe une
infinité de commandes umob associées à une
vitesse opérationnelle A& donnée
(infinité de solutions du modèle cinématique inverse).
Dans le cas où Ddm-u =0, le système
est qualifié de non redondant, par contre, si
Ddm -u<0, le système est
considéré comme sous-actionné.
Nous allons dans ce qui suit nous intéresser aux
particularités (en termes de contraintes) des systèmes non
holonomes.
III.8. Contraintes de Roulement Sans Glissement
Vu que le système de locomotion des robots mobiles que
nous devons étudier inclut des roues, celles ci sont les seules
responsables de son mouvement, leur contribution implique tout de même
des contraintes en raison d'un contact avec le sol. La nature de l'interaction
(régularité, matériaux en contact) a une forte influence
sur les propriétés du mouvement des roues relativement au sol. En
supposant que les liaisons sont parfaites, cela induira trois hypothèses
[Bay05] :
-Le sol comme les roues sont indéformables
-La surface de contact est assimilée à un point
-Les roues, de rayon r, roulent sans glisser sur le
sol
On supposera toujours qu'il y aura roulement sans glissement
(r.s.g), et que le sol est parfaitement plan. En pratique, de légers
glissements sont engendrés lors du contact de la roue avec la surface
sur laquelle a lieu le mouvement. L'hypothèse de dire qu'une roue pleine
est indéformable est fausse dans le cas de roues équipées
de pneus.
Le r.s.g d'une roue verticale évoluant sur un plan se
traduit par une vitesse nulle au point de
contact B entre la roue
et le plan, ce point ayant comme coordonnées (x,y) par rapport
à un
repère fixe RA. è?
représente l'orientation de la roue par rapport à
xrA, ? est l'angle de rotation
de la roue. ùP est le vecteur de sa vitesse de
rotation etvP exprime la vitesse du centre P.
La figure Fig.III. 1 exprime les différents
paramètres liés aux contraintes de roulement sans glissements sur
le sol [Fru05].
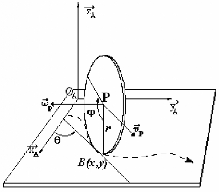
Fig.III.1: Présentation des paramètres
d'une roue verticale sur un plan
Les équations des contraintes de r.s.g sont
exprimées relativement à chaque roue, la nullité des
vitesses correspondantes se traduit donc selon deux plans [Pad05] :
-dans le plan vertical de la roue pour tout type de roues :
[ ( ' ) ( ' ) ( )] ( ) ( ) 0
- + + + + + + =
Sin Cos bCos R A & rCos &
á â ã á â ã â
ã á ã ?
T (3.6)
p
-dans le plan orthogonal au plan vertical de la roue
(excepté pour les roues suédoises) :
[Cos(á '+â) Sin(á
'+â) b'+ bSin( â ) R( á ) A &
p + b' â & = 0 (3.7)
] T
R(á) est une matrice de rotation
d'angle á autour de l'axe zr [Khl99], cette matrice est prise
en compte car la plateforme évolue dans le plan (OA
, xA, yA), ce qui expliquera qu'elle soit
considérée comme évoluant et s'orientant autour de l'axe
zr .
? -
Cos( ) Sin( ) 0
á á 1
R( ) Sin( ) Cos( ) 0
? ?
á á á
= ? ?
? ?
? 0 0 1 ÿ
Les paramètres ?, â, á', b , ã et b'
sont présentés en chapitre I, paragraphe1.7.1. III.9.
Etudes de différents systèmes
Dans les prochains paragraphes, nous concrétiserons les
différentes notions évoquées précédemment
grâce à des exemples.
Nous commencerons par une présentation des bras
manipulateurs, et plus précisément d'une chaîne
cinématique ouverte comprenant deux liaisons rotoïdes, nous
décrirons les différentes notions qui lui sont relatives,
ensuite, nous étudierons les robots mobiles où nous
présenterons une plateforme de type voiture, et là nous
évoquerons les contraintes de roulement sans glissement,
caractéristique spécifique aux systèmes mobiles à
roues.
Un dernier paragraphe sera consacré aux manipulateurs
mobiles, où nous traiterons du cas d'un système mécanique
représenté en deux dimensions, composé d'une plateforme
mobile sur laquelle est placé le bras manipulateur double pendule
horizontal.
Avant d'expliciter les différentes significations des
coordonnées généralisés pour un bras manipulateur
et pour une plateforme mobile, nous devons rappeler que pour une structure
articulée, la liaison est représentée par ce que nous
avons appelé dans le chapitre I une articulation, pour une plateforme
mobile, une liaison est moins flagrante ; elle représente la prise en
considération de la configuration des roues comme cela est
explicité ci-dessous.
| 

