Chapitre IV
Modélisation
IV.1. Introduction
Les bras manipulateurs présentent la
spécificité d'avoir des limites dans leurs mouvements à
cause de leur morphologie, puisque contraints par le nombre d'articulations
qu'ils comportent, ainsi que la longueur des segments dont ils sont
composés ; ils révèlent de ce fait des limites qui peuvent
paraître dans la forme de leur volume de travail. Les robots mobiles
quand à eux ont la particularité de se mouvoir dans des espaces
assez importants, mais leur inconvénient majeur réside dans leur
incapacité à interagir avec l'environnement.
Une des solutions pour pallier aux défauts des deux
systèmes est le fait de les combiner pour construire un nouveau
composant qui est le manipulateur mobile.
Le but d'utilisation d'un système
représenté par une chaîne articulée embarquée
sur un véhicule, est d'opérer grâce à l'organe
terminal dans un grand espace, mais il peut présenter un problème
des plus récurrents, qui se base sur l'aspect planification de
trajectoire et de mouvement. Cette caractéristique est
étroitement liée à la modélisation, puisque nous
nous devons de générer une trajectoire et un mouvement en nous
aidant des différents modèles géométrique et
cinématique.
Dans le cadre de notre étude, le système
articulé seul est redondant vis à vis de la tâche
imposée, alors que la plateforme est non holonome. Le robot que nous
allons étudier exécute des Tâches à Mouvement (et
Trajectoire) Opérationnel(le) Imposé(e) ; pour ce cas
particulier, des problèmes subsistent car :
-L'intrusion du robot mobile (quel que soit son type) induit
dans la majorité des cas une redondance, qui rend le problème de
modélisation compliqué à résoudre; la plateforme
mobile peut avoir une infinité de situations pour une configuration fixe
du bras manipulateur, comme cela est représenté en Fig.IV. 1.
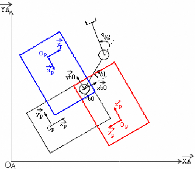
Fig.IV.I. Influence de la configuration de la plateforme
sur la redondance du manipulateur mobile
-Les systèmes non holonomes présentent
l'inconvénient que certaines trajectoires ne soient pas faisables.
-Le nombre important de coordonnées et vitesses
généralisées du bras relativement à la tâche
opérationnelle imposée ajoute des degrés de liberté
au système déjà redondant.
Nous allons dans une première partie de ce chapitre
commencer par présenter le modèle géométrique
direct en procédant de deux manières différentes. La
seconde partie aura trait au modèle géométrique inverse,
qui consistera en une proposition de solution de planification de mouvement de
la plateforme en prenant en considération les contraintes non holonomes,
de sorte à faire suivre la trajectoire opérationnelle
imposée à l'organe terminal. Ensuite, nous entamerons
l'étude de la cinématique du système par la description du
modèle direct de notre manipulateur mobile ; et enfin, le dernier volet
de ce chapitre sera consacré à l'étude du modèle
cinématique inverse, où nous présenterons la
méthode des tâches additionnelles, qui s'accorde conjointement
avec la méthode d'inversion du modèle géométrique
proposée.
Dans tous les modèles que nous allons présenter
dans ce chapitre, nous commencerons par traiter du cas général
d'un bras manipulateur comportant n variables articulaires,
porté sur une plateforme mobile non holonome, pour terminer par
l'étude du cas particulier de notre système.
| 
