IV.2.Présentation du système à
étudier
Nous nous somme intéressé à
l'étude d'un système robotique comportant un bras manipulateur
redondant géométriquement vis à vis de la tâche,
celle ci doit s'exécuter dans un espace à trois dimensions. Notre
choix s'est porté sur le bras Mitsubishi PA10 7CE ; la plateforme mobile
quand à elle est un véhicule de type voiture.
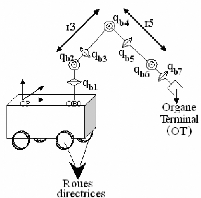
Fig.IV.2. Présentation du manipulateur
mobile
Connaissant le bras manipulateur et la plateforme mobile sur
lesquels nous devons opérer, le système combiné est
présenté en Fig.IV.2 [Nen04] [Xu05] ; La plateforme mobile est
non holonome de type voiture comportant 2 roues directrices se trouvant
à l'avant, et deux roues arrières pour stabiliser le
système, le bras embarqué sur la plateforme mobile se trouve au
centre de l'axe des roues avants, il comprend 7 articulations rotoïdes ;
les paramètres présentant la géométrie de ce
système articulé sont exposés en Annexe C.
IV.3.Modèle géométrique direct
Le modèle géométrique direct d'un
système quelconque représente des fonctions grâce
auxquelles les coordonnées opérationnelle sont liées au
coordonnées généralisées.
La situation A=[A1 A2 A3 A4 A5 A6]
T de l'OT présentée dans un espace
opérationnel à trois dimensions pour un manipulateur mobile
portant un seul bras manipulateur, est fonction de sa configuration,
représentée par les coordonnées
généralisées des différentes articulations
Ang=[qb1.....qbn]T et les
coordonnées propres à la plateforme, telles son orientation
á ainsi que les coordonnées cartésiennes [XP
YP] d'un point de référence OP.
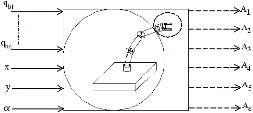
Fig.IV.3. Modèle géométrique
direct
Nous nous proposons de présenter deux méthodes de
calcul du modèle géométrique direct pour un manipulateur
mobile.
Remarque
Dans les parties suivantes, nous allons considérer
Cá comme représentant le cosinus de l'angle
á, et Sá comme étant le sinus de l'angle
á, aussi, nous définissons tgá comme la
tangente de l'angle á; aussi, arcCá est la
fonction arc cosinus le l'angle á,
IV.3.1. Matrices de passage
Ce procédé consiste à calculer le
modèle géométrique direct du manipulateur mobile en
utilisant des matrices de transformation d'espaces [Yam94] [Xu05].
Le système de repérage est présenté
en Fig.IV.4, où nous pourrons distinguer 3 repères de
référence qui sont :
· Repère absolu
Il est présenté comme RA= (OA , x
r A , y r A , z r A), c'est le repère de
référence dans lequel
doivent être représentées les positions de
l'organe terminal, à savoir, A1, A2 et
A3
respectivement selon les axes xrA,
yrA et zrA, ainsi que ses orientations
A4,A5 et A6 selon les trois
axes de référence précédents.
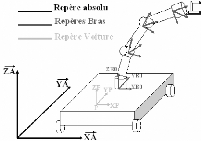
Fig.IV.4 : Représentation des repères
pour un manipulateur mobile
Le repère RA est choisi orthonormé,
direct, fixe, et tel que l'axe zrA est normal à la
surface sur laquelle évolue la plateforme à roues [Pad05]
· Repère plateforme
Le robot mobile doit avoir un repère RP=
(OP, x r P , y r P , zr P ) ; ce
repère sera représenté dans RA par la position
XP et YP de son origine OP, ainsi que par
l'orientation de ses axes á.
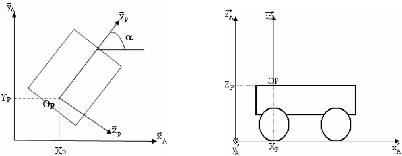
(a) (b)
Fig.IV.5 : représentation du repère
plateforme : (a) Vue de Dessus, (b) Vue de Profil
La matrice de transformation ATP
exprime la position et l'orientation du repère RP par rapport
au repère absolu RA comme suit :
Cá
S á
0
0
|
- S 0
á
á
C 0
0 1
0 0
|
X P
Y
P
Z P
1
|
|
A
?
T = ? P ?
?
· Repère Bras
Le repère RB0= (OB0 x B0 y
B0 z B0 )
, r , r , r se trouve à
la base du bras, alors que les repères des
différentes articulations se succèdent
jusqu'à atteindre celui de l'organe terminal (Fig.IV.4).
C'est dans RB0 que vont être
calculées les coordonnées opérationnelles de l'OT
; ces calculs donneront le modèle géométrique direct du
bras manipulateur, qui est défini comme étant la procédure
qui exprime la relation entre les coordonnées opérationnelles
[XE YE ZE Ø È Ö] T et les
différentes variables articulaires [qb1..
..qbn]T, il en résultera une matrice de
transformation d'espace B0TBn (dans le cadre de notre
étude la matrice de transformations d'espaces sera
B0TB7).
Nous avons considéré que l'illustration de ce
modèle était inutile dans ce paragraphe, car son
élaboration a été une procédure couramment
exposée et très souvent mise en oeuvre ([Khl99] [Yam94], [Gor84],
[Dao94], [Vib87]) ; par conséquent, pour plus d'éclaircissements,
nous préférons ramener le lecteur vers l'Annexe A. Nous
considérons que le vecteur [XE YE ZE]T illustre les
positions cartésiennes de l'organe terminal selon les axes x r
B0, y r B0 et z r B0, et
[Ø È Ö ]T étant
la représentation non redondante des angles de rotation d'Euler [Bay0 1]
[Khl99], selon les trois axes précédemment cités. Les
coordonnées de l'origine OB0 du repère bras dans RP
sont a' selon l'axe xrP et b' selon
l'axe yrP. La matrice PTB0 exprime la
situation de OB0 dans le repère (OP, x r
P, y r P , zrP)
E1 0 0 a'l
P (4.2)
? 0 1 0 b' Ò T B 0 = ? 0 0 1 0
Ò
? ? 0 0 0 1 Ò ÿ
Finalement, du produit matriciel de l'équation (4.2)
résultera la matrice de transformation
d'espace ATBn.
ATBn = AT P .
PTB0 . B0T Bn
(4.3)
Grâce à la matrice de transformation d'espace
ATBn, nous pourrons déduire la position et
l'orientation de l'organe terminal par rapport au repère absolu
RA. Le calcul des différentes coordonnées
opérationnelles A=[A1 A2 A3 A4 A5 A6]T se
fera donc directement d'après la description des matrices de passage en
Annexe A.
| 

