IV.3.2. Calcul direct
Cette approche consiste à calculer
immédiatement le modèle géométrique direct par des
expressions analytiques [Fou98] [Bay0 1], en suivant le système de
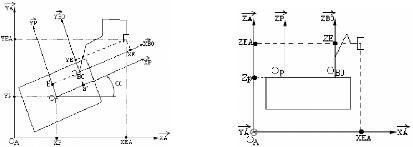
repérage présenté en Fig.IV. 6.
Nous pouvons déduire de cette représentation
que pour un manipulateur mobile quelconque, les valeurs des coordonnées
en position A1, A2 et A3 sont étroitement
liées à la configuration de la plateforme [XP YP
á]T, cela ajoutera par conséquent trois
degrés de liberté au système articulé, et
contribuera donc à créer une redondance
géométrique. Les orientations A5 et A6 ne
changent pas en incluant la plateforme, alors que la rotation á
contribue à faire varier la valeur du paramètre
A4.
r r
r r et (OA ,x A , zA)
Fig.IV.6 : représentation des repères
dans les plans (OA ,x A ,yA)
Les différentes expressions résultantes sont :
|
A1=XEA=XP + (a
'+XE)Cá - (b '+YE) Sá
|
(4.4)
|
A2=YEA=YP +
(b'+YE)Cá+(a'+XE)Sá
|
(4.5)
|
A3=ZEA=ZE+ZP
|
(4.6)
|
A4=Ø+á
|
(4.7)
|
A5=È
|
(4.8)
|
A6=Ö
|
(4.9)
|
|
Le modèle géométrique direct d'un
manipulateur mobile représente donc le fait de considérer la
situation de l'organe terminal dans le repère absolu RA ; pour
le système que nous devons étudier, ce calcul fera appel à
sa configuration qcfg=[XP YP á qb1 qb2
qb3 qb4 qb5 qb6 qb7]T.
La méthode des matrices de transformations d'espaces
est une méthode qui fait appel à différentes matrices
relatives à chaque repère, cette approche nous illustre le
modèle géométrique direct par étapes, cela veut
dire que chaque repère se déplace relativement à un autre,
puisque RP est en mouvement par rapport à RA,
RB0 est considéré par rapport à RP, et
RBn se déplace relativement à RB0.
Cette approche est particulièrement structurée car elle est
très implicite en terme de représentation, et de vision
géométrique dans l'espace, dans le sens où la notion de
relativité apparaît grâce à la disposition des
matrices.
La méthode analytique est simple à
implémenter et rapide relativement au temps de calcul, elle
présente aussi un avantage lors du calcul du modèle
cinématique direct du système, car, pour la mise en oeuvre de la
matrice jacobienne, il est nécessaire de considérer les vitesses
en positions qui sont les dérivées temporelles des positions
cartésiennes ; pour les orientations, il suffit de calculer les vitesses
de rotations du système articulé, alors, les vitesses en rotation
du manipulateur mobile se déduiront très vite (pour plus de
détails concernant le modèle cinématique, voir le
paragraphe IV.5.). Cette méthode présente tout de même un
inconvénient majeur, car elle est attachée de trop prés au
système de repérage présenté en Fig.IV.4, et un
simple changement dans la disposition des repères implique l'utilisation
de manoeuvres mathématiques, pour pouvoir modéliser le
système, alors que la méthode des matrices de transformations
d'espaces est appropriée dans ce cas ; il ne suffit qu'à modifier
certains paramètres (dans les matrices de références
ATP, PTB0 ou
B0TBn), qui sont régis par des
règles
précises et des lois spécifiques, liées
à la définition même des matrices de transformations
d'espaces.
| 

