Comme la définition de ce type de modèle le
stipule, le modèle géométrique inverse d'un manipulateur
mobile quelconque évoluant dans un espace tridimensionnel, a comme but
de calculer ses coordonnées généralisées [XP YP
á qb1. ..qbn]T, en fonction de la
situation imposée à son organe terminal [A1 A2 A3 A4 A5
A6]T dans le repère RA.
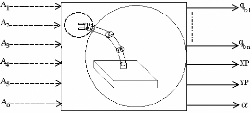
Fig.IV.7.Représentation du modèle
géométrique inverse d'un manipulateur mobile
Contrairement au modèle géométrique
direct, son inverse n'a pas de règles de calculs spécifiques,
donc, nous devons user de stratégies propres au type de systèmes
à étudier (le bras manipulateur et la plateforme mobile).
Dans le cadre de notre étude, la situation de l'organe
terminal ne sera représentée que par les coordonnées
cartésiennes [XEA YEA ZEA]T= [A1 A2
A3]T, alors, seule la sous chaîne Ang=[qb1
qb2 qb3 qb4]T responsable du positionnement de
l'OT est prise en compte[Nen04].
Le modèle géométrique inverse du
manipulateur mobile à étudier est donc représenté
schématiquement en Fig IV.8.
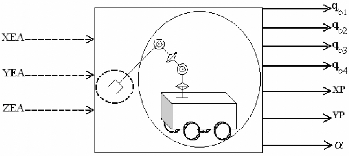
Fig.IV.8.Représentation du modèle
géométrique du manipulateur mobile à
étudier
Nous pouvons décréter de prime abord que le
manipulateur mobile à étudier est géométriquement
redondant, vis-à-vis de la tâche de suivi d'une trajectoire
opérationnelle imposée, compte tenue de la condition que le bras
manipulateur soit composé de quatre coordonnées
généralisées Ang=[qb1 qb2 qb3
qb4]T ; alors que nous avons une dimension de l'espace
opérationnel dim(EOP) égale à 3, ceci
inclut un degré de redondance géométrique égal
à 1. Le nombre de coordonnées généralisées
s'accroît en adjoignant la plateforme mobile ayant une situation
Ap=[XP YP á]T, avec une
dimension de l'espace opérationnel dim(EP)
égale à 3, dés lors, le degré de redondance
géométrique du manipulateur mobile
(dim(EP)+ 1) sera égal à 4. La
représentation du modèle géométrique inverse
(Fig.IV.8) fait apparaître cette redondance géométrique,
puisque le nombre de paramètres en entrée, exprimant la situation
imposée à l'organe terminal [XEA YEA ZEA]T,
dans le repère RA, est inférieur au nombre de
paramètres en sortie qcfg=[XP YP
á qb1 qb2 qb3 qb4]T , illustrant la configuration du
système complet.
· Problématique
Le modèle géométrique inverse est
délicat à mettre en oeuvre si la configuration
qcfg prise en compte est traitée globalement.
Puisqu'une trajectoire géométrique quelconque ne peut pas
être imposée au système mobile, sans considérer les
contraintes non holonomes, donc, une tâche qui exige un suivi de la
trajectoire par l'organe terminal du bras manipulateur, représente une
contrainte supplémentaire pour le système mobile, qui doit
constamment veiller à faire suivre à l' OT la
trajectoire exigée.
· Solution
Puisque les contraintes non holonomes ne transparaissent
qu'en traitant le système mobile cinématiquement, alors, cela
nous incitera à étudier le mouvement du véhicule
plutôt que sa trajectoire.
Nous allons proposer une solution découplant
partiellement le système: nous commencerons par planifier le mouvement
de la plateforme en prenant en charge les contraintes non holonomes, de sorte
à ce qu'elle puisse placer le bras manipulateur dans des zones, lui
permettant de suivre la trajectoire opérationnelle imposée, puis,
nous inverserons le modèle géométrique du bras
manipulateur en utilisant une méthode de calcul itérative pour
enfin placer l'OT dans la situation désirée.

