Une trajectoire opérationnelle est définie
comme étant un parcours se développant dans l'espace
opérationnel ; il est composé d'une succession de points assez
rapprochés pour représenter une trajectoire, cela est
réalisé dans le but de permettre à l'organe terminal du
bras manipulateur embraqué de suivre un chemin plus ou moins lisse.
Chaque point de cette trajectoire sera appelé «
échantillon ».
Chaque échantillon est décrit par ses propres
coordonnées C=[Xc Yc
Zc]T dans le repère
RA= (OA ,
x r A , y r A,z r A). La trajectoire
opérationnelle imposée prendra donc part aussi dans le
repère RA (Fig.IV.9), elle est
représentée par un certain nombre d'échantillons NECH
; le bras porté sur la plateforme se doit de les atteindre tous.
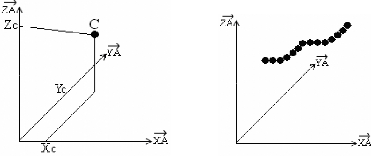
(a) (b)
Fig.IV.9 : Représentation de la trajectoire
opérationnelle :(a) Présentation d'un échantillon dans le
plan
r r r
(OA ,xA ,yA ,zA)
r r r , (b) Représentation d'une
trajectoire opérationnelle dans le plan (OA ,x A ,yA
,zA)
Dans l'approche que nous avons adopté, nous nous
sommes donné comme objectif premier de construire un chemin
prédéfini à la plateforme mobile, de sorte à
toujours faire suivre à l'organe terminal du bras manipulateur la
trajectoire opérationnelle imposée, en ramenant le bras dans des
postures grâce auxquelles les NECH
échantillons successifs exigés par la tâche (ayant comme
coordonnées [Xc Yc
Zc]T), puissent être atteints.
Une plateforme mobile à roues a comme
spécificité une aptitude à ne se mouvoir que dans le plan
(OA , x r A,y r
A), contrairement au bras manipulateur que nous voulons
étudier, qui a
la particularité de pouvoir atteindre des hauteurs
Zc relativement aux limites exprimées par la
longueur des segments dont il est composé[Xu05]. La solution que nous
avons proposé pour la planification de trajectoire s'attache à
ces caractéristiques, qui nous informent que, pour atteindre un
échantillon désiré C, il faut que le
véhicule soit placé de sorte à ce que le bras puisse
atteindre la hauteur désirée Zc ; pour
installer ce système mobile, il faut qu'une distance de
référence soit respectée entre la projection de
l'échantillon C dans le plan (OA , x
r A , y r A)
(qui est Cxy selon Fig.IV.10.) et la base du bras
OB0.
Pour un échantillon C=[Xc
Yc Zc]T quelconque, nous avons construit
une surface circulaire nommée « champ », pour
délimiter l'espace des positions auxquels doit appartenir le point
OB0 . Si la plateforme mobile rentre dans ce champ, cela signifie que
le bras peut atteindre l'échantillon désiré, sinon, il
faut faire rapprocher le véhicule davantage. Cela sera mieux
explicité schématiquement selon Fig.IV. 10.
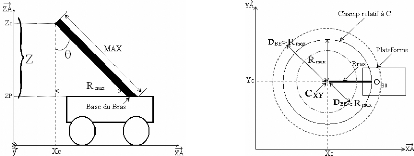
(a) (b)
Fig.IV.10. : Notations pour le calcul du champ relatif
à un échantillon prédéfinit pour un
manipulateur
mobile :(a) Vu de profil, (b) Vu de haut
Nous appelons champ, un cercle virtuel émis par
l'échantillon que le bras doit atteindre ; plus la hauteur
Zc augmente, et plus son rayon Rmax
diminue et vice versa.
Connaissant l'envergure maximale MAX du bras
manipulateur, ainsi que la hauteur désirée
Zc, alors nous pourrons calculer la valeur de
Rmax. Le calcul de cette distance sera
présenté en équations (4.10-4.12).
Z=Zc-ZP (4.10)
Z
è = arcC (4.11)
MAX
Rmax = Sè.MAX (4.12)
L'échantillon désiré C n'est
atteignable par le bras, que si le point de référence
OB0 rentre à l'intérieur du champ.
Considérant la distance DBE séparant la base
du bras de Cxy, sa valeur doit être inférieure ou
égale à Rmax (DBE= Rmax) d'après
Fig.IV.10.b.
Pour la planification de trajectoire, nous nous baserons sur
la construction de champs relatifs à certains échantillons
sélectionnés ; avant d'entamer cette phase, Nous devons nous
imposer des hypothèses de travail:
-La dimension de l'espace opérationnel est égale
à 3, car nous ne considérons que les coordonnées
cartésiennes.
-Le porteur du bras Mitsubishi PA10 7C comporte 4 liaisons
rotoïdes, ce qui donne un seul degré de redondance
géométrique pour le bras manipulateur [Nen04].
-La surface sur laquelle évolue la plateforme est lisse
et plane.
-Le manipulateur mobile évolue en espace libre (sans
obstacles).
-Le bras ne peut pas atteindre tous les échantillons ce
qui incitera le système de locomotion à être
sollicité.

