La planification de trajectoire du système mobile est
effectuée en générant une trajectoire, relativement aux
champs engendrés par les différents échantillons.
L'algorithme suivant relate les différentes étapes menant
à la construction de la trajectoire planifiée.
1-Soit T une trajectoire opérationnelle
imposée ayant comme nombre d'échantillons NECH 2-Soit
Dist une distance définie pour séparer chaque couple
d'échantillons.
3-Initialisation de k, Nbr,
Cp.
Tant que Nbr=NECH
A - Calcul des rayons Rk et RNbr
pour les champs liés à Ck et CNbr
B - Tracer en CNbr le segment PR
perpendiculaire à SCp segment liant Ck et
CNbr.
C - Définir le point d'interaction
PNbr entre le champ de rayon RNbr et
PR.
D - Connecter deux points PNbr et Pk
pour former la trajectoire planifié ôCp.
E - k=k+Dist
F - Nbr=Nbr+Dist
G - Cp=Cp+1
Sachant que dans la phase 3, k=1, Nbr=Dist et
Cp=1.
La figure IV. 11 illustre ces différentes étapes
de constructions de la trajectoire imposée au système mobile.
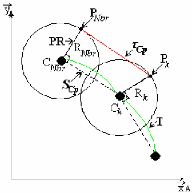
Fig.IV.11 : Planification de trajectoire de la
plateforme
Le résultat de cette planification de trajectoire
consiste en une succession de segments connectés de sorte à
former une trajectoire continue.
L'exemple présenté en Fig .IV.12.b. est une
illustration de l'approche de planification de trajectoire que nous avons mis
en oeuvre, la distance entre échantillons Dist étant
égale à 20cm.
La tâche imposée est le suivi d'une trajectoire
opérationnelle ayant la forme d'une ellipse
dans le plan(OA, x
r A,Y r A) selon Fig .IV.12.a . La hauteur
augmente de 1mm/échantillon, les
échantillons consécutifs sont distants de 1cm, la
hauteur du premier échantillon étant de 71.7cm.
Cette planification a comme but de placer le point de
référence OB0 de sorte que le bras
manipulateur puisse atteindre les échantillons imposés.
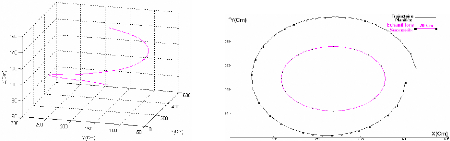
(a) (b)
FigIV.12 : Exemple d'une trajectoire
opérationnelle imposée : (a) Représentation de la
trajectoire
opérationnelle dans RA, (b) Résultat de la
planification de trajectoire
Nous pouvons constater que la trajectoire planifiée
s'approche progressivement de la
trajectoire imposée dans le plan
(OA , x r A , Y r A), cela est dû à
l'influence de la hauteur qui
s'accroît au fur et à mesure de
l'évolution de la trajectoire imposée. Au début, la
hauteur était de 71.7 cm, elle correspond à la plus petite
hauteur que le bras puisse atteindre (hypothèse que nous avons
émis), ce qui permet d'éloigner au maximum
OB0 du premier échantillon, par contre, puisque nous avons
incrémenté la hauteur au fur et à mesure de
l'évolution spatiale des échantillons opérationnels,
alors, le dernier échantillon sera le plus haut, et donc, la plateforme
devrait se mettre la plus proche de la trajectoire imposée.


