IV.4.1.4. Planification du mouvement de la plateforme
Après avoir planifié la trajectoire de la
plateforme, en nous referant à l'information présente dans
l'espace opérationnel, nous allons générer le mouvement du
système mobile en considérant les contraintes non holonomes.
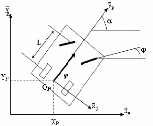
Fig.IV.13. : Représentation des
caractéristiques d'un robot mobile de type voiture
Le planificateur de mouvement utilisé a
été présenté par Latombe et Barraquand [Pru96] .Ils
ont proposé une solution qui repose sur l'idée qu'il existe une
trajectoire entre deux configurations, appartenant à un même
espace libre (pas contraint par des obstacles), si l'angle de braquage ?
prend au moins deux états pour une vitesse v
imposée qui est non nulle. Le planificateur consiste
à faire mouvoir le robot selon des sous trajectoires faisables, en
mémorisant les différents points atteints de l'espace admissible.
Les équations de mouvement du robot de type voiture sont décrites
par :
v
á(t) = á(0) + t. tg?
(4.13)
L
L
x t x 0
( ) ( ) ( ( ) ( ))
= + S t S 0
á á
-
tg?
L
y t y 0
( ) ( ) ( ( ) ( ))
= - C t C 0
á á
-
tg?
|
(4.14)
(4.15)
|
|
L est la distance entre le point OP et
l'axe des roues avants, á(0) est l'angle initial de rotation de
la plateforme par rapport à l'horizontale, et á(t) est
l'angle de rotation de la plateforme à l'instant t. Ces
équations nous permettent de définir le point atteint
après un temps t donné, en imposant la vitesse v
et l'angle de braquage des roues avants ?.
La plateforme doit suivre la trajectoire
précédemment planifiée conformément aux
règles régies par les équations (4.13- 4.15).
Après avoir planifié le mouvement de la
plateforme, qui nous a permis de connaître au préalable la
position de la base du bras, grâce au repère de
référence RB0, nous nous devons d'inverser le
modèle géométrique du bras manipulateur pour pouvoir
accéder à la configuration Ang=[qb1 qb2 qb3
qb4]T, qui nous permettra de faire atteindre
l'échantillon désiré C=[Xc
Yc Zc]T à l'organe terminal.
IV.4.2. Inversion du modèle du bras
manipulateur
Les systèmes d'équations exprimant un
caractère non linéaire peuvent être présents dans
divers domaines, Le cas particulier de la géométrie inverse des
bras manipulateurs en fait partie. Le modèle géométrique
direct d'un système articulé est représenté par des
équations, décrites mathématiquement par des relations
trigonométriques ; elles sont fonction des coordonnées
généralisées, et de leurs produits, ces équations
ne peuvent généralement pas être inversées
directement ; ce sont des problèmes qui peuvent s'avérer
difficiles à résoudre[Flü98].
Nous allons présenter dans cette section
différentes méthodes de calcul du modèle
géométrique inverse, et de là, nous choisirons celle que
nous considérerons la plus appropriée à notre
problème.
| 

