Des méthodes d'inversion du modèle
géométrique ont pu être classifiées selon leurs
procédés de calcul. Nous allons présenter dans ce qui suit
chacune d'entre elles en exprimant leurs particularités.
· Méthodes symboliques ou
analytiques
Ce sont des méthodes qui présentent des
résultats sous forme de solutions algébriques. Elles permettent
de mettre en évidence certaines propriétés des robots. Ces
méthodes présentent l'avantage d'être les plus performantes
au niveau des calculs informatiques, puisqu'elles donnent des solutions
algébriques minimales.
Pieper a été l'un des précurseurs dans
le domaine du calcul du modèle géométrique inverse par les
méthodes symboliques, puisqu'il a été l'un des premiers
à proposer des solutions pour certains manipulateurs à 6 axes
ayant des morphologies particulières [Flü98].
Il n'existe pas encore de méthodes analytiques
générales pour la résolution d'équations du
modèle géométrique inverse, ceci étant
l'inconvénient majeur de l'utilisation de ce type de méthodes ;
elles présentent également le désavantage d'être
sensibles au nombre d'inconnus et aux degrés des équations
· Méthodes adaptatives
Ces méthodes de résolution proviennent d'autres
domaines d'applications, et ont été testées sur des
systèmes robotiques, nous citerons entre autres celles basées sur
le raisonnement géométrique, les réseaux de neurone
[Flü98], ou encore les algorithmes génétiques [Lav0 1].
Ces méthodes peuvent s'avérer très
efficaces, car ayant été testées sur certains
problèmes en robotique qui ont été résolus avec
succès, elles se restreignent tout de même à des
problèmes spécifiques seulement.
· Méthodes itératives
Une solution pour remédier aux problèmes de non
linéarité du modèle direct est d'utiliser des
méthodes itératives ; elles présentent une
originalité par rapport aux procédés de calcul
illustrées précédemment, car elles opèrent en usant
des méthodes d'approximations successives pour la minimisation d'une
erreur, qui doit s'en trouver inférieure à un seuil
prédéfini. Certes, auparavant, ces méthodes étaient
lentes à s'exécuter, puisqu'elles s'opéraient en des temps
de calcul importants, mais l'augmentation de la puissance des ordinateurs
autorise actuellement leurs utilisations [Flü98] [Pho04].
Pour le problème que nous avons eu à traiter,
nous avons utilisé l'une de ces méthodes, nous allons nous y
pencher d'avantage en considérant le cas particulier
représenté par le bras manipulateur que nous allons
étudier.
V' Méthode par linéarisation du
modèle
Le traitement d'un problème de non
linéarité pour un système d'équations quelconque,
par la méthode proposée, consiste à suivre deux
étapes :
- rendre le système d'équations
linéaire.
-Calculer une solution approchée par une méthode
de Newton, en sa qualité de procédé accédant
à une convergence quadratique rapide.
La dérivée partielle des équations du
modèle géométrique direct, en fonction de chacune des
coordonnées généralisées du système
articulé représente une linéarisation du modèle,
elle est exprimée de ce fait sous une forme matricielle par la
jacobienne.
La méthode de Newton procède par
incréments de positions ; c'est une méthode qui calcule des
solutions approchées à l'aide de la représentation
linéaire du système d'équations, qui est mise en
évidence par la jacobienne dans l'espace des vitesses, en
considérant des incréments infinitésimaux.
Généralement, les trajectoires imposées
aux systèmes articulés présentent la particularité
d'être composées de points (échantillons) proches les uns
des autres, ceci implique des changements de configurations pas très
importants. L'utilisation des méthodes itératives peut
s'avérer de ce fait intéressante.
Nous avons utilisé cette méthode, en suivant les
étapes présentées au niveau de l'organigramme
exposé en Fig.IV.14.
Cette méthode nécessite une initialisation de
paramètres tels que ; une estimation des coordonnées
généralisées Ang0
=[qb10 qb2 0qb30
qb40]T , le vecteur å
représentant les erreurs admises par rapport à chaque
coordonnée généralisée, ainsi que le nombre
d'itérations kmax. OT0 est calculé
grâce au modèle géométrique direct [Khl99] du bras
manipulateur. J-1 représente la matrice jacobienne inverse du
système, qui est calculée à partir de la jacobienne
directe pour la configuration donnée Angk-1=
[qb1k-1 qb2k-1 qb3k-1
qb4k-1]T[Flü98] [Dao94].
J-1 a été inversée grâce
à la pseudo inverse de Moore-Ponrose [Pho04], compte tenue du fait que
c'est une matrice qui n'est pas carrée (étant une
conséquence de la redondance du bras manipulateur).
Les coordonnées opérationnelles de
l'échantillon imposé C=[Xc Yc
Zc]T sont exprimées dans le repère
absolu RA ; le modèle inverse s'effectuera pour sa part dans le
repère RB0, ce qui nous incitera à utiliser
B=[Xcb Ycb Zcb]T vecteur des
coordonnées opérationnelles imposées, exprimées
dans le repère RB0, en nous aidant des expressions
du modèle géométrique direct du manipulateur
mobile(4.4-4.6) tel que :
Xcb=-a
'+(Yc-YP)Sá+(Xc-XP)Cá
(4.16)
(-( c - ) + ( + )C ) (4.17)
X X a' X cb á
P
Ycb=-b '+
S á
Zcb=Zc-ZP (4.18)
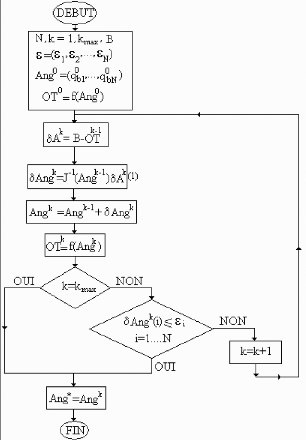
Fig.IV.14. : Organigramme de la méthode
d'inversion du modèle géométrique du bras
Nous avons pu rencontrer deux méthodes de
résolution du modèle géométrique inverse par
linéarisation du modèle : celle proposée par B.Gorla et
M.Renault [Gor84] recorrige le décalage par rapport à l'erreur
å dans l'espace généralisé, alors que
C.Pholsiri [Pho04] recalcule le modèle par rapport à l'erreur
dans l'espace opérationnel. La méthode qui minimise l'erreur dans
l'espace généralisé peut prendre en considération
la résolution minimale du bras manipulateur (le plus petit angle que
peut faire l'articulation), comme cela fut adopté dans notre cas, alors
que la prise en compte de l'erreur dans l'espace opérationnel peut
présenter l'avantage d'atteindre les échantillons
désirés dans l'espace opérationnel, avec l'admission d'une
certaine erreur.
Nous allons nous consacrer dans ce qui suit à
l'étude cinématique de notre système, en donnant les
formules générales nécessaires à
l'élaboration du modèle direct ; le modèle inverse pour sa
part sera traité relativement au système étudié.


