Le modèle cinématique direct d'un manipulateur
mobile comportant un seul bras manipulateur, pouvant évoluer dans un
espace opérationnel à trois dimensions expose les expressions des
vitesses opérationnelles [ ]T
A & 1 A & 2 A & 3 A
& 4 A & 5 A & 6 en fonction des
vitesses
généralisées
[q&b1...q & bn X &
P Y&P á & ]T ,
comme cela est illustré en Fig IV. 15.
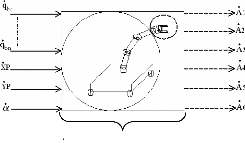
J(qb1,...,qbn,XP,
YP,á)
FigIV.15. Présentation du Modèle
Cinématique
Le calcul du modèle cinématique du
système de manipulation mobile nécessite la dérivation par
rapport au temps, des expressions précédemment formées en
équations (4.4- 4.6) relativement aux vitesses linéaires[ ]T
A & 1 A & 2 A & 3
, pour ce qui est des vitesses angulaires, il suffit de calculer les
vitesses angulaires du bras manipulateurØ& ,
È& et Ö& comme cela
est présenté en équation (4.19) [Fou98].
1 ? ? ? ? ? ? ? ??
(4.19)
{ }
( ' ) ( ' )
a X S b Y C
+ + +
á á á &
E E
} á &
&
Z E
&
&
Ø
+á
&
È
&
Ö
+ + - +
{ ( ' ) ( ' )
a X C b Y S
E E
á á
1 ? ? ? ? ? ? ? ??
&
X S YEC YP
á á
+ +
E
X C Y S XP
E E
á á
- +
& & &
& & &
A6
&
A1
&
A2
&
A3
&
A4
&
A5
Pour modéliser un système de manipulation
mobile, le calcul de la matrice jacobienne du système articulé
Jm est une étape que nous nous devons d'accomplir au
préalable ; nous avons présenté en Annexe B une
méthode [Dao94][Flü98] pour la construire, en nous basant sur les
matrices de transformations d'espaces.
Les vitesses opérationnelles linéaires
X&E,
Y&E et Z& E
ainsi que les vitesses angulaires Ø & ,È
& etÖ&
liées au repère bras RB0 sont
accordées avec les vitesses généralisées du
système articulé &Ang = q &
b 1 . .. q & bn , grâce à la
matrice jacobienne Jm, elle est fonction de la
configuration
[ ]T
Ang=[qb1...qbn]T du bras
manipulateur.
Dans le cadre de notre étude, nous avons
présenté en Annexe B les expressions analytiques des vitesses
linéaires opérationnelles X&
E, Y&E et
Z& E en fonction des coordonnées
généralisées Ang=[qb1 qb2 qb3
qb4]T du porteur du bras Mitsubishi PA10 7CE.
Nous tenons à signaler relativement à
l'équation (4.19) que l'influence des vitesses de la plateforme mobile
n'apparaît que dans la représentation liée à A
& 1, A & 2 et A
& 4, par contre, ces vitesses ne
représentent aucune importance pour les paramètres
A&3, A & 5 et
A & 6. De ce fait, nous pouvons subdiviser le
modèle cinématique en deux parties distinctes [Bay01],
représentant respectivement l'influence des vitesses relatives au
système articulé, exprimées dans le vecteur [ ]T
& Ang = q & b 1 ... q
& bn , et celle des vitesses de la plateforme mobile,
illustrées dans
[ ]
le vecteur T
A & p = X & P Y
& P á& .
Le modèle cinématique en situation du
système de manipulation mobile sera donc exprimé dans
l'équation (4.20)
{ }
á á á á á
á
... 1 0 ( ' ) ( ' ) 1
? ?
1n 2n 1n 2n E E
+ + + - +
{ } ?
J S J C J S J C a X C b Y S
á á á á á
á
... 0 1 ( ' ) ( ' )
? ? ?
? ? J J Ò
31 3 n
... 00 0
? = ? ?
J J
41 4 n
... 00 1
? ? ?
? ? J J
... 0 0 0 Ò
51 5 n
? ?? ??
? J J
? ? 44444444444444 3
44444444444444 ÿ
1 2
61 6n
... 0 0 0
J
L'équation (4.2 1) nous permet de connaître
l'expression générale de la matrice jacobienne, sans nous soucier
du type de plateforme à considérer.
Les contraintes non holonomes induisent une dépendance
entre les paramètres liés à la plateforme. Cette
corrélation nous permet de réduire la matrice jacobienne pour
former le
[ ] ?
r A ng
&
J b J p Tr &
.
1 42 43 ? ?p ÿ
&
A=
J
(4.23)
modèle cinématique réduit ; le modèle
cinématique d'un manipulateur mobile est donc lié au type de
plateforme portant le bras manipulateur.