V.4.Trajectoires opérationnelles
imposées
Dans le cadre de notre étude, nous avons
considéré trois types de trajectoires opérationnelles
imposées telles que :
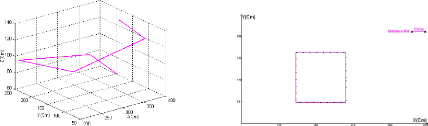
V.4.1 .Trajectoire carrée
Cette trajectoire est particulière, puisqu'elle
comporte une évolution sous forme de segments perpendiculaires les uns
pas rapport aux autres ; une plateforme mobile non holonomes ne pourrait pas
suivre ce type de trajectoire si l'on devait la lui imposer directement.
· Caractéristiques
Longueur du grand axe :170 Cm
Longueur du petit axe :170 Cm
Evolution de la hauteur : 1mm/échantillon Nombre
d'échantillons : 675
(a) (b)
r r r
Fig.V. 2. Trajectoire carrée (a)
représentation dans le plan ( , z A )
O A , x A , y A , (b)
représentation dans le
plan (OA, x r
A,y r A)
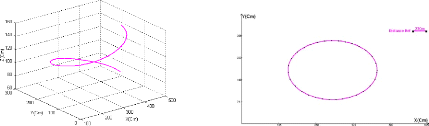
V.4.2.Trajectoire ellipsoïdale
Cette trajectoire est lisse mais elle comporte une
évolution non linéaire, en raison des longueurs des rayons qui
diffèrent. Si l'on imposait un certain angle faisant partie de
l'ellipse, il ne couvrirait pas le même périmètre dans tout
l'espace représentant la forme ellipsoïdale.
· Caractéristiques
Longueur du grand axe : 150 Cm.
Longueur du petit axe : 100 Cm
Evolution de la hauteur :1 mm/échantillon Nombre
d'échantillons : 719
(a) (b)
r r r
Fig.V.3. Trajectoire ellipsoïdale :
représentation dans le plan ( , z A )
O A , x A , Y A ,
représentation dans le
plan (OA, x r
A,Y r A)
V.4.3.Trajectoire Circulaire
Cette trajectoire est lisse et régulière ; si l'on
prenait un angle quelconque faisant partie du cercle, il couvrirait la
même distance appartenant au périmètre du cercle.
· Caractéristiques
Longueur du grand axe :100 Cm.
Longueur du petit axe :100 Cm.
Evolution de la hauteur : 1mm/échantillon Nombre
d'échantillons : 563

(a) (b)
r r r
FigV.4.Trajectoire circulaire : représentation
dans le plan ( , z A )
O A , x A , Y A ,
représentation dans le plan
Remarques
Les caractéristiques du bras manipulateur ainsi que
celles de la plateforme sont présentées en Annexe C.
L'unité de mesure des variables articulaires Ang = [qb1 qb2
qb3 qb4]T, ainsi que celle des paramètres relatifs
à la plateforme, tels que á et ? est le radian;
les vitesses généralisées relatives au bras manipulateur
quand à elles sont considérées en radians/seconde.
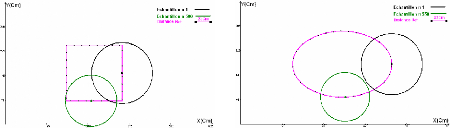
V.5.Représentation des Champs
Les champs représentés en Fig.V.5 pour la
trajectoire ellipsoïdale sont relatifs à l'échantillon
n°1, ainsi qu'à l'échantillon numéro 550, par contre,
pour la trajectoire
circulaire, les champs représentés sont
relatifs à l'échantillon n°1, et l'échantillon
numéro 440, la trajectoire carrée quand à elle comprend la
représentation du champs relatif à l'échantillon
numéro 1 ainsi que le numéro 500.
Nous pouvons remarquer que les champs
générés relativement aux deux échantillons
considérés pour chaque trajectoire sont très particuliers,
puisque le rayon du premier échantillon (représenté en
noir) est plus important que celui du second, cela est dû à
l'augmentation de la hauteur, facteur prépondérant dans la
diminution du rayon d'un quelconque champ. Si par contre, les hauteurs des
différents échantillons étaient identiques, alors les
rayons des différents champs Rmax le seraient tout
autant.
(a) (b)


(c)
Fig.V.5. Représentation des champs
(a) Trajectoire carrée, (b) Trajectoire
Ellipsoïdale, (c) Trajectoire circulaire
Avant d'entamer l'étude de la planification de la
trajectoire, et la génération du
mouvement de la plateforme mobile, une explication concernant
le déplacement du système
de manipulation mobile lors de
l'inversion du modèle géométrique se présente
comme
nécessaire.
| 

