Nous avons considéré deux types d'approches
pour la planification de la trajectoire du système mobile. Elles
représentent une même base de réflexion, ayant comme
principe de traiter le rayon des champs générés par les
échantillons de référence, mais la différence
réside dans la manière d'appréhender le problème.
La planification appelée « aller » ne traite que du
cas des échantillons en allant du premier vers le dernier, pour le
deuxième type de planification dit « aller-retour »,
nous avons effectué l'opération de planification en allant du
premier échantillon vers le dernier, ensuite nous avons appliqué
l'opération inverse en allant
du dernier échantillon vers le premier, cela nous permet
de faire suivre à la plateforme une trajectoire où la variation
des angles de braquage devraient être moins grandes.
Nous allons dans ce qui suit présenter un exemple de
planification de trajectoire de type « aller »
appliquée aux trois types de trajectoires opérationnelles
imposées, pour donner un aperçu sur la manière
d'appréhender le problème du suivi d'une trajectoire
opérationnelle imposée.
La planification de mouvement envisagée dans
l'approche que nous avons adopté nécessite l'initialisation de
certains paramètres, tels que la vitesse v imposée
à la plateforme égale à 5cm/s; ces variables gardent la
même valeur tout au long de ce chapitre. Les résultats de cette
planification de mouvement sont présentés en Fig.V.6.
Nous pouvons constater que les trajectoires planifiées
pour les trajectoires opérationnelles
imposées de type
circulaire et ellipsoïdale représentent une projection de la
trajectoire
opérationnelle dans le plan (OA , x r
A , y r A ), avec une évolution relative tout de
même à la
hauteur ; par contre, pour la trajectoire carrée,
composée de quatre lignes perpendiculaires les unes par rapport aux
autres, nous remarquons que lorsque la trajectoire opérationnelle se
présente comme une ligne droite, la trajectoire planifiée la suit
en pente (à cause de la variation de la hauteur). Lorsqu'il y a passage
d'un segment à un autre qui lui est perpendiculaire (appartenant
à la trajectoire carrée), la planification donne un
résultat représentant une trajectoire comportant des segments
successifs ayant des pentes inférieures à 9Ø°,
nommés TL dans (Fig.V.6.a), permettant ainsi à la
plateforme non holonome de tourner progressivement.
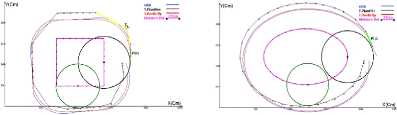
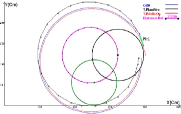
(a) (b)
(c)
Fig.V.6. Planification de mouvement de la
plateforme:
(a) Trajectoire carrée, (b) Trajectoire
Ellipsoïdale, (c) Trajectoire circulaire.
Le mouvement réel de la plateforme (pour les trois
types de trajectoires opérationnelles imposées) épouse la
forme de la trajectoire planifiée, avec plus ou moins de
fidélité, à cause des limites dans les
déplacements, imposées par les contraintes non holonomes.
Nous remarquons qu'il existe tout de même un
décalage entre la trajectoire planifiée imposée et le
mouvement réel de la plateforme. Nous pouvons de prime abord
décréter que la trajectoire opérationnelle imposée
est non atteignable par l'organe terminal car, déjà au
début du mouvement de la plateforme, nous remarquons que le rayon du
champ de l'échantillon numéro 1 est inférieure à la
distance séparant la trajectoire opérationnelle et celle
représentée par la base du bras OB0, et ce
décalage s'en trouve plus apparent pour le deuxième champ
(représenté en vert) où déjà, lors de la
planification de trajectoire, le chemin planifié frôle le champ
concerné, et le décalage s'accentue quand nous avons
considéré le mouvement réel de la plateforme
(OB0 se trouve à l'extérieur du champ, ce qui
empêchera obligatoirement l'organe terminal d'accéder aux
coordonnées opérationnelles imposées). De ce fait, pour
les trajectoires précédemment planifiées, le bras
manipulateur n'est même pas parvenu à atteindre les premiers
échantillons. Nous avons donc trouvé nécessaire de faire
approcher la trajectoire planifiée de la trajectoire
opérationnelle; une solution appropriée consiste à
modifier les rayons des échantillons de référence, car,
puisque la plateforme ne suit pas fidèlement la trajectoire
planifiée et sort quelque peu de son itinéraire, la solution
consiste à diminuer les rayons Rmax pour faire
admettre à la plateforme un certain décalage.
Nous allons dans ce qui suit présenter les deux types
de planifications pour les trois types de trajectoires de
références choisies, tout en diminuant les rayons des champs,
ensuite, nous ferons le choix du planificateur le plus adéquat pour
chaque type de trajectoire, selon des critères particuliers. La
configuration globale Ang0 est initialisée à
[0.5, 1.5, 0, 0. 14]T , nous considérerons aussi la distance
entre échantillons de référence égale à 23
cm. L'erreur admise å est égale à la
résolution minimale des liaisons du bras manipulateur qui est
égale à 0.0009 radians pour chaque articulation. Nous devons
également initialiser le nombre d'itérations kmax qui
est égal à 1000. Dans les parties suivantes, nous signalerons un
quelconque changement survenu sur les valeurs des paramètres
å, Ang0, kmax, ainsi que
Dist.
Remarque
Nous allons évoquer dans les paragraphes suivants le
nombre d'itérations de la plateforme, cela est accompli dans le but
d'éviter d'évoquer les variables temporaires, alors que notre
intérêt s'est porté sur l'évolution spatiale des
échantillons. Une itération de la plateforme correspond à
0.2s dans l'espace temps.


