Nous allons dans ce qui suit diminuer les rayons
Rmax des différents échantillons de
référence en le divisant par un certain quotient appelé
Val, nous allons donc considérer le rayon
Rmax/Val, nous donnerons une valeur à
Val supérieure à 1, et nous tenterons de valider les
deux approches de planifications choisies (« aller » et «
aller-retour »). Nous allons
particulièrement focaliser sur l'influence des deux
types de planifications sur l'évolution de la plateforme, et sur le fait
d'assurer ou non un suivi de la trajectoire opérationnelle
imposée, pour les trois types de trajectoires.
· Trajectoire carrée
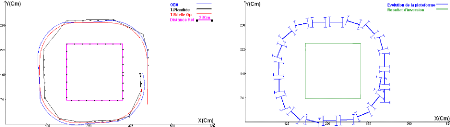
(a) (b)
Fig.V.7. Planification trajectoire en « aller
» de la plateforme mobile (Val=1.26) (a) Mouvement de la
plateforme, (b) Validation du modèle
géométrique
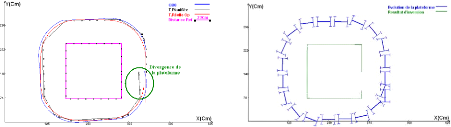
(a) (b)
Fig.V.8. Planification trajectoire en «
aller-retour » de la plateforme mobile avec (Val=1.26)
(a)
Mouvement de la plateforme, (b) Validation du modèle
géométrique
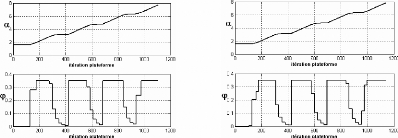
(a) (b)
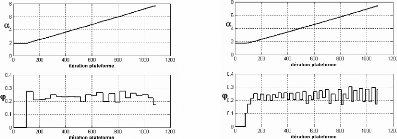
Fig.V.9. Paramètres propres à la
plateforme
(a) Planification de type aller, (b) Planification de
type aller-retour
La planification en « aller-retour » est apparemment
celle qui permet à la plateforme mobile de suivre la trajectoire
planifiée presque fidèlement, elle n'assure tout de même
pas
forcément le suivi de la trajectoire
opérationnelle imposée, cela est dû au fait que
OB0 s'éloigne de la trajectoire planifiée imposée
au niveau du dernier virage, alors que le planificateur en « aller »
parvient à suivre la consigne jusqu'à pouvoir faire atteindre le
dernier échantillon à l'organe terminal. En planification en
« aller-retour», le système articulé mobile ne parvient
à atteindre tous les échantillons opérationnels que si
Val = 1.4
· Trajectoire Ellipsoïdale
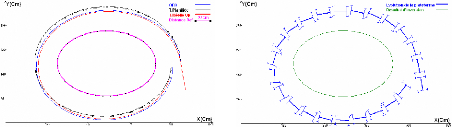
(a) (b)
Fig.V.10. Planification trajectoire en «
aller-retour » de la plateforme mobile (Val=1.24) : (a) Mouvement
de la plateforme, (b) Validation du modèle
géométrique
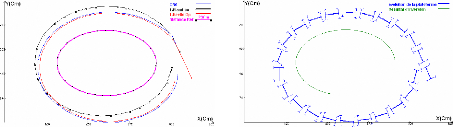
(a) (b)
Fig.V.11. Planification trajectoire en « aller
» de la plateforme mobile (Val=1.24)(a) Mouvement de
la
plateforme, (b) Validation du modèle
géométrique
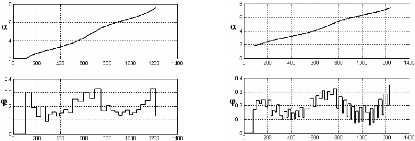
(a) (b)
Fig.V.12. Paramètres propres à la
plateforme
(a) Planification de type aller, (b) Planification de
type aller-retour
La qualité première du planificateur en «
aller-retour » est qu'il soit apte à imposer une variation assez
progressive des angles de braquage, alors que l'évolution de ?
pour le planificateur «aller» présente des variations
plus grandes.
Le paramètre Val doit être égal
à 1.65 en planification « aller » pour pouvoir permettre un
suivi complet de la trajectoire opérationnelle.
· Trajectoire circulaire
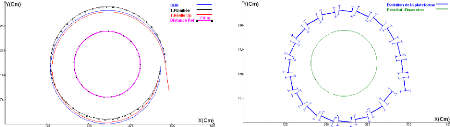
(a) (b)
Fig.V.13. Planification trajectoire en «
aller-retour » de la plateforme mobile (Val=1.24) :
(a)
Mouvement de la plateforme, (b) Validation du modèle
géométrique
(a) (b)
Fig.V.14. Planification trajectoire en « aller
» de la plateforme mobile (Val=1.24):
(a) Mouvement de la
plateforme, (b) Validation du modèle
géométrique
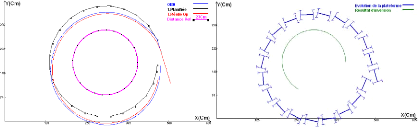
(a) (b)
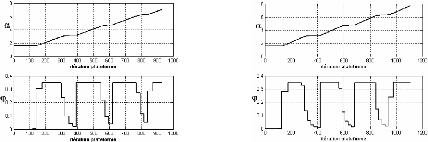
Fig.V.15. Paramètres propres à la
plateforme : (a) Planification de type Aller, (b) Planification de
type
aller-retour
Pour ce type de trajectoire, la valeur minimale que peut
prendre Val pour pouvoir atteindre tous les échantillons
opérationnels, est égale à 1.46 en planification «
aller ».
Nous pouvons remarquer que l'angle de braquage ?
pour ce type de trajectoire présente énormément de
variations en planification « aller-retour »; les valeurs de
? se situent entre 0.16 et 0.3 radians, alors qu'en planification en
« aller », où hormis la première variation importante
qui est de l'ordre de 0.27 radians, les fluctuations se réduisent par la
suite, et ? se situe entre la valeur 0.19 radians et 0.27 radians.
· Interprétation
Les expériences appliquées aux trois types de
trajectoires montrent que le paramètre á ne varie pas
beaucoup, selon le type de planification ; par contre, l'angle de braquage
? se montre comme fortement sollicité lors de la planification
en « aller-retour ». Cela est dû à la prise en compte
des échantillons de référence en aller et en retour,
où les points Pi (présentés dans le paragraphe
VI.4. 1.3) sont très proches, ce qui entraîne de soudaines
variations au niveau du paramètre ?.
Pour ce qui est de la planification en « aller »,
elle présenterait certainement un inconvénient, car il faut que
la roue soit apte à braquer d'un angle maximal en un certain laps de
temps. Or, comme nous l'avons constaté (surtout pour la trajectoire
carrée), la variation des angles de braquage est importante.
La planification en « aller-retour »
présente par contre un autre inconvénient relativement à
l'énergie consommée, puisque le nombre de variations de l'angle
? est important, alors l'énergie consommée le sera
également.
Nous pouvons remarquer que la planification en «
aller-retour» permet un suivi plus exact du chemin planifié par la
plateforme mobile, pour tous les types de trajectoires opérationnelles
utilisées.
Le fait de pouvoir éloigner la plateforme mobile le
plus possible de la trajectoire opérationnelle imposée (Val
prend la valeur la plus petite possible), tout en permettant à
l'organe terminal d'atteindre les échantillons est un avantage, l'espace
admissible relatif à la plateforme mobile s'en trouve plus vaste, ce qui
permet de re-planifier la trajectoire du système mobile dans le cas de
présence d'obstacles.
En faisant abstraction de l'aspect énergétique
et des vitesses de braquage, et en donnant la priorité au facteur
d'aptitude de l'organe terminal à atteindre les échantillons
opérationnels désirés, nous allons par la suite
considérer une planification en « aller-retour » pour les
trajectoires circulaire et ellipsoïdale, et une planification en «
aller » pour la trajectoire carrée.
Nous allons dans ce qui suit modifier le paramètre
Val en vérifiant son influence sur les variables articulaires,
ainsi que sur les paramètres relatifs à la plateforme mobile.
V.6.5. Modification des paramètres pour la
planification de trajectoire V.6.5.1. Influence de la longueur des rayons des
champs de référence
· Trajectoire carrée
(a) (b)
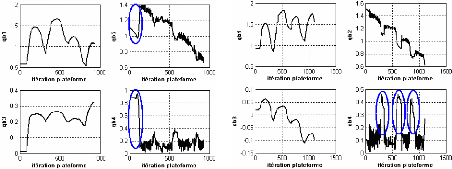
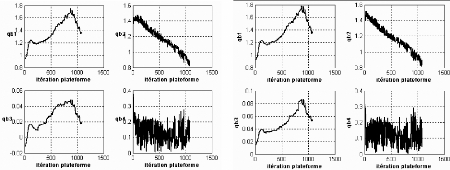
Fig.V.17. Coordonnées
généralisées du bras manipulateur: (a) Val=2, (b)
Val=1.26
(a) (b)
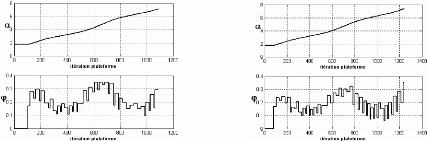
Fig.V.18. Paramètres propres à la
plateforme : (a) Val=2, (b) Val=1.26
Nous remarquons une fluctuation assez importante au niveau
des angles qb2 et qb4 pour
Val=2 (Fig.V. 1 7.a), ces mêmes coordonnées
généralisées présentent également des
variations importantes (comparées à la valeur moyenne de ces
angles), qui surgissent subitement à certains moments seulement pour
Val=1 .26.
L'orientation de la plateforme ainsi que l'angle de braquage
ne présentent pas de différences perceptibles. Nous avons
constaté que le nombre d'itérations de la plateforme pour
Val=2 est égal à 931, alors que pour Val =
1.26, le nombre d'itérations est égal à 1109.
· Trajectoire ellipsoïdale
(a) (b)
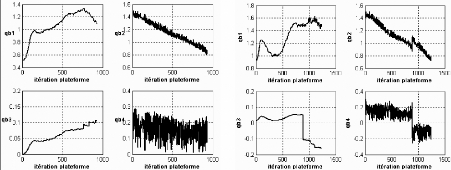
Fig.V.19. Coordonnées
généralisées du bras manipulateur: (a) Val=2, (b)
Val=1.24.
(a) (b)
Fig.V.20. Paramètres propres à la
plateforme : (a) Val=2, (b) Val=1.24
Pour ce type de trajectoire, nous avons constaté que
pour le cas où Val =1.24, les angles qb2,
qb3 et qb4 comportaient un changement
brusque au niveau de l'itération 892, cela représente un
inconvénient surtout que ce phénomène ne se produit pas
lorsque le paramètre Val est égal à 2, où
nous constatons une évolution progressive des variables articulaires
sans changements brusques. Cela risque d'engendrer une perte en énergie
(c'est la fluctuation la plus importante qui se présente au niveau de
l'évolution de ces articulations).
Dans le cas où la valeur du paramètre Val
est égale à 1.24, nous constatons que l'angle de braquage
? exprime un plus grand nombre de variations. Le nombre
d'itérations de la plateforme correspond à 1090 itérations
pour Val=2, alors qu'il est égal à 1246 pour
Val=1 .24.
· Trajectoire circulaire
(a) (b)
Fig.V.21. Coordonnées
généralisées du bras manipulateur: (a) Val=2, (b)
Val=1.24
(a) (b)
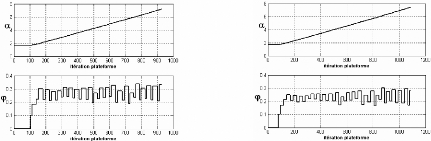
Fig.V.22. Paramètres propres à la
plateforme : (a) Val=2, (b) Val=1.24
Nous pouvons remarquer qu'il n'existe pas une grande
différence entre l'évolution des résultats pour Val
= 2 et Val =1.24. Lorsque Val=1 .24, l'angle de braquage
maximal se présente comme plus important (Fig.V.21.b). Il est
égal à 0.35 rad pour Val=2 alors, qu'il équivaut
à 0.28 rad pour Val=1 .24. Il y a eu 930 itérations
ayant permis au système articulé mobile d'atteindre tous les
échantillons opérationnels pour Val=2, alors que ce
nombre s'accroît en augmentant la distance pour Val=1.24
puisqu'il devient égal à 1089.
· Interprétation
Les trois trajectoires présentent une diminution dans
les déplacements de la plateforme lorsque Val prend une valeur
importante, ceci s'accorde avec le fait qu'en diminuant les rayons des
différents champs pour les échantillons de
référence, la distance que doit parcourir la plateforme diminue
également.
Nous pouvons remarquer tout de même que les
butées articulaires n'ont pas été atteintes pour les deux
exemples (Val=2 et Val=1 .24), ce qui nous permet de
considérer que l'estimée globale Ang0
constitue un choix intéressant.
Nous constatons pour les trois types de trajectoires que
l'évolution de la hauteur est subie en majorité par l'angle
qb2, car sa valeur diminue au fur et à mesure.
Pour la trajectoire ellipsoïdale, les fluctuations
évoquées précédemment au niveau des angles
qb2, qb3 et qb4 sont survenus
pour l'itération numéro 892 avec Val étant
égal à 1.24, car le bras manipulateur est presque allongé,
la distance qui sépare l'échantillon courant C de
OB0 est quasiment égale à la distance
Rmax (la distance (Rmax
-distance (OB0, Cxy)) est de l'ordre de 0.0001cm). Lors
de l'étude de la trajectoire carrée, nous avons également
rencontré des changements brusques dans l'évolution des angles
qb2 et qb4; nous pouvons
expliquer aussi ce phénomène par rapport à la distance
séparant OB0 de l'échantillon
désiré C. Cela peut être aperçu au niveau
des courbes présentées en Fig.V.24, où nous avons
calculé pour chaque déplacement de la plateforme la
différence « Dif = Rmax -distance
(OB0, Cxy) » , ce paramètre est illustré
dans la figure suivante :
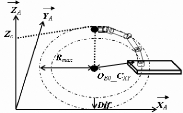
Fig.V.23. représentation de la Distance
Dif
Nous pouvons constater que les fluctuations relatives
à Dif coïncidaient avec les variations des angles
qb2 et qb4, cela permet de
dire que la distance séparant les échantillons, de la base du
bras OB0 est un critère important influençant
fortement l'évolution des variables articulaires.
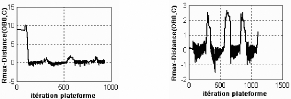
(a) (b)
Fig.V.24. Distance Dif : (a) Val=2 ,
(b) Val=1.26
Une autre variable à initialiser est la distance entre
les échantillons Dist. C'est la raison pour laquelle nous
allons dans ce qui suit modifier cette valeur en l'augmentant, et nous allons
vérifier si ce changement pourrait présenter une influence sur
les résultats obtenus.


