Dans cette partie, nous allons modifier la distance entre les
échantillons de références Dist, nous allons
considérer Dist=50cm, et Dist=10cm, sachant que
Val est égale à 2.
· Trajectoire carrée :
(a) (b)
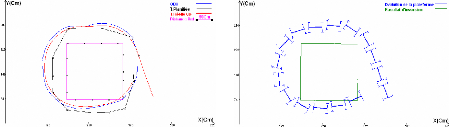
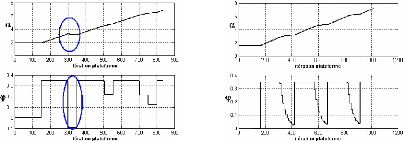
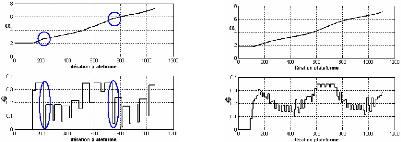
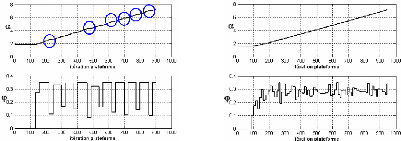
Fig.V.25. Planification trajectoire de la plateforme
mobile (Dist=50Cm)
(a) Mouvement de la plateforme,
(b) Validation du modèle géométrique
(a) (b)
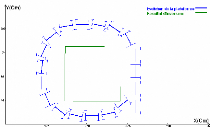
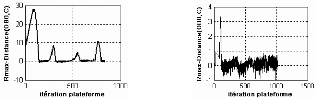
Fig.V.26. Planification trajectoire de la plateforme
mobile (Dist=10Cm):
(a) Mouvement de la
plateforme, (b) Validation du modèle
géométrique
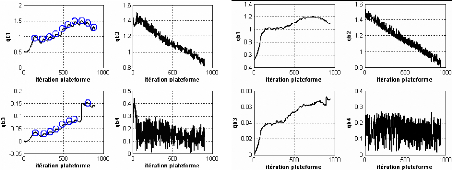
(a) (b)
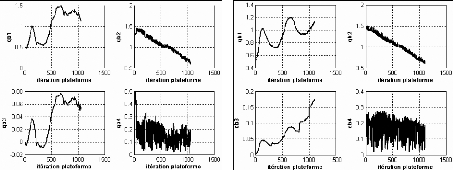
Fig.V.27. Coordonnées
généralisées du bras manipulateur : (a)
Dist=50Cm, (b) Dist=10Cm
(a) (b)
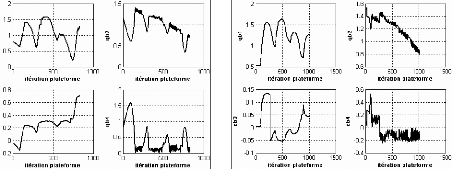
Fig.V.28. Paramètres propres à la
plateforme : (a) Dist=50Cm, (b) Dist=10Cm
Si le carré représentant la trajectoire
opérationnelle était composée de murs (la plateforme ne
doit pas percuter un des segments), alors nous pouvons juger que l'obstacle est
heurté, car nous remarquons que la plateforme s'approche trop
prés de la trajectoire opérationnelle.
Nous constatons que pour Dist=50cm, l'angle
á présente une évolution presque linéaire.
Il existe une diminution brusque de l'angle ? au niveau de
l'itération numéro 299, sa valeur égale à -0.09,
alors qu'il était égal à 0.35, ce changement dans la
valeur de l'angle de braquage apparaît même au niveau de la courbe
illustrant l'orientation de la plateforme á.
Nous pouvons remarquer que les angles
qb2 et qb4 présentent des
irrégularités qui n'étaient pas présentes au
départ, cela est dû à l'influence de la distance
Dif (définit au paragraphe V.6.5. 1) présenté en
Fig.V.29.
(a) (b)
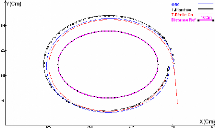
Fig.V.29. Distance Dif : (a)
Dist=50Cm , (b) Dist=10Cm
· Trajectoire ellipsoïdale


(a) (b)
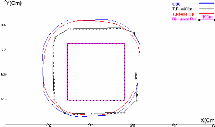
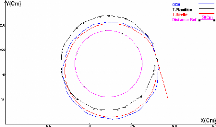
Fig.V.30. Planification trajectoire de la plateforme
mobile (Dist=50)
(a) Mouvement de la plateforme, (b)
Validation du modèle géométrique

(a) (b)
Fig.V.31. Planification trajectoire de la plateforme
mobile (Dist=10Cm) (a) Mouvement de la plateforme,
(b) Validation du modèle géométrique
(a) (b)
Fig.V.32. Coordonnées
généralisées du bras manipulateur : (a)
Dist=50Cm, (b) Dist=10Cm.
(a) (b)
Fig.V.33. Paramètres propres à la
plateforme (a) Dist=50Cm, (b) Dist=10Cm
Nous remarquons pour les deux exemples
précédents que les angles de rotation du bras manipulateur ne
présentent pas une évolution particulière ; par contre, le
comportement de la plateforme mobile est modifié, puisque l'angle de
braquage ? présente de très faibles variations, au
nombre important, lorsque Dist=10cm, contrairement au cas où
Dist=50cm, où les angles de braquage des roues
présentent de grandes variations, mais leurs nombre est moins
important.
L'angle á se présente comme moin
régulier pour Dist=50cm, cela coïncide avec une
évolution brusque de l'angle de braquage à certaines
périodes du mouvement illustré en Fig.V.33.a.
· Trajectoire circulaire
(a) (b)
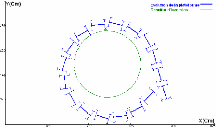
Fig.V.34. Planification trajectoire de la plateforme
mobile (Dist=50Cm) (a) Mouvement de la plateforme,
(b) Validation du modèle géométrique

(a) (b)
Fig.V.35. Planification trajectoire de la plateforme
mobile (Dist=10Cm) (a) Mouvement de la plateforme, (b)
Validation du modèle géométrique
(a) (b)
Fig.V.36. Coordonnées
généralisées du bras manipulateur : (a) Dist=50Cm, (b)
Dist=10Cm.
(a) (b)
Fig.V.37. Paramètres propres à la
plateforme : (a) Dist=50Cm, (b) Dist=10Cm
L'angle á apparaît comme quasiment
linéaire quand Dist=10cm, alors qu'il l'est moins quand
Dist=50cm ; cela se répercute sur l'évolution de la
configuration du système articulé. Nous pouvons remarquer que les
angles qb1 et qb3
présentent une évolution pas très lisse, ces variations
particulières coïncident avec les variations perçues dans
l'angle de braquage ?. Nous avons également pu remarquer que
dans la trajectoire relative à OB0
présentée en (Fig.34.a), le chemin généré
par la plateforme se présente comme une vague, cela est une
conséquence des changements survenus au niveau de la courbe
présentée sur la figure V.37.a. (comparée aux courbes
précédentes).
· Interprétation
Lorsque la distance entre les échantillons de
référence n'est pas très importante, le mouvement de la
plateforme suit très fidèlement la trajectoire planifiée,
alors que lorsque la valeur de Dist est importante, la plateforme
n'est pas apte à suivre le chemin prédéfini, et cela se
répercute sur le comportement des variables articulaires.
Quand la distance entre les échantillons de
référence est assez importante, l'angle ?
présente un nombre de variations restreint, cela est dû au
fait que la roue ne soit pas très souvent sollicitée pour
braquage, mais la variation que prend cet angle dans les phases de changements
d'angles est importante.


