V.6.5.3. Modification de la position initiale de la
plateforme
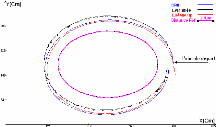
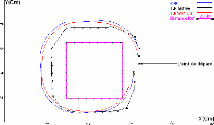
Nous avons modifié dans cette partie le point de
départ de la plateforme, en faisant en sorte de placer le point de
départ de la base du bras manipulateur OB0 sur le
premier point de la trajectoire planifiée, comme cela est
présenté sur la figure V.38 pour les trois types de trajectoires
opérationnelles imposées. Nous allons illustrer les
coordonnées généralisées liées au bras
manipulateur pour les trois types de trajectoires opérationnelles
imposées.
(a) (b)

(c)
Fig.V.38. Planification trajectoire et
mouvement de la plateforme mobile : (a)Trajectoire carrée,
(b)
Trajectoire ellipsoïdal, (c) Trajectoire circulaire
· Trajectoire carrée

Fig.V.39. Coordonnées
généralisées du bras manipulateur
· Trajectoire ellipsoïdale

Fig.V.40. Coordonnées
généralisées du bras manipulateur
· Trajectoire circulaire

Fig.V.41. Coordonnées
généralisées du bras manipulateur
· Interprétation
Nous pouvons remarquer pour ces trois trajectoires que le fait
de placer la plateforme mobile à un endroit précis modifie le
comportement du système articulé. Le problème de
dépassement des butées articulaires ne s'étant pas
présenté auparavant, le fait de modifier seulement la position
initiale pour le système mobile a permis d'atteindre les butées
articulaires au niveau de l'angle qb2, qui a
dépassé la valeur limite imposée par le système
articulé (qui est de l'ordre de 1.7 radians). Dans le cas
présent, qb2 présente une valeur de
départ supérieure à 2 radians pour les trois types de
trajectoires.
Tout au long de cette partie, nous avons pu constater que le
comportement du bras manipulateur était étroitement lié
à l'évolution de la plateforme mobile; nous tenons
également à signaler que l'erreur maximale Max(A-AD)
calculée par rapport à toutes les expériences
présentées précédemment est inférieure
à 2mm, ce qui signifie que l'approche adoptée permet un suivi de
la trajectoire opérationnelle imposée avec une grande
fidélité.
V.7.Modéle cinématique inverse
Nous allons étudier dans ce paragraphe le comportement
d'un manipulateur mobile, en imposant les positions et les vitesses pour chaque
échantillon [Xc Yc Zc X &
cY& c Z & c ]T.
Nous avons imposé la trajectoire opérationnelle en
fonction du temps. Les équations régissant cette trajectoire sont
[Xu05] :
Xc=DX+GR*C(2*ð*
t ) (5.1)
P
Yc=DY-PR*S(2*ð*
t ) (5.2)
P
Zc=ZP+0.1t (5.3)
Avec ZP=40+3 1.7cm, DX et DY
représentent l'abscisse et l'ordonnée du centre de
l'ellipse, GR et PR représentent respectivement le
rayon le plus grand et le moins grand de l'ellipse, et enfin P=360.
Le calcul des vitesses opérationnelles [X&
c Y& c Z & c ] T consiste
à dériver les expressions (5.1 -
5.3). La vitesse linéaire selon l'axe zr n'est
pas en fonction du temps, c'est une constante égale à 0.1
cm/s.
La planification de mouvement du système mobile
présentée en Fig.V.42. a pu être effectuée selon le
procédé exposé précédemment (dans le
paragraphe V.6.) ; nous constatons que les échantillons n'ont pas pu
être tous atteints, notre but n'est pas de valider le modèle
géométrique, mais d'étudier la cinématique, donc le
fait que le système soit inapte à suivre totalement la
trajectoire désirée importe peu. Le nombre d'échantillons
atteints est donc égal à 85 échantillons. L'estimée
initiale est Ang0= [0.5, 1.5, 0, 0. 14]T.
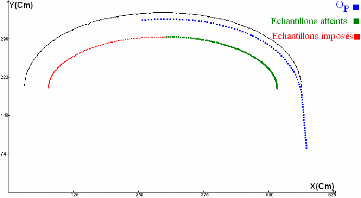
Fig.V.42. Planification de mouvement pour Trajectoire
opérationnelle imposée évoluant en fonction
du
temps
Nous allons présenter dans ce qui suit les
résultats concernant les différentes tâches additionnelles,
que nous avons évoqué dans le chapitre précèdent.
Nous imposons dans tous les cas comme première tâche additionnelle
la commande de mobilité çp, nous allons
tester dans ce qui suit les différents choix de la seconde tâche.
Aussi, nous allons évoquer une entité qui représente
Det( J), c'est le déterminant du manipulateur mobile,
et aussi Det(J.JT) qui représente
le déterminant du sous-système bras manipulateur, pour tester le
lien entre les résultats relatifs aux vitesses
généralisées et les singularités.
| 

