V.7.1.Choix numéro 1
La vitesse opérationnelle imposée A&
4 est égale à 0.

Fig.V.43. Vitesses généralisées du
bras manipulateur
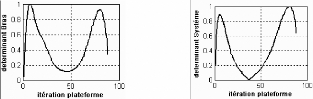
Fig.V.44.Prsentation des Déterminants
V.7.2.Choix numéro 2
La vitesse imposée q& b1
est égale à 0.1 rad/s.

Fig.V.45. Vitesses généralisées du
bras manipulateur
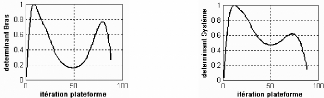
Fig.V. 46.Présentation des
Déterminants
V.7.3.Choix numéro3
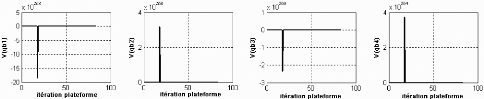
Fig.V.47. Vitesses généralisées du
bras manipulateur
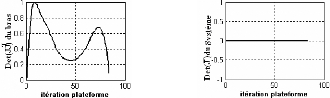
Fig.VI.48. Présentation des
Déterminants
· Interprétations
Les résultats obtenus ne présentent pas
véritablement de points communs, or, la vitesse relative à
l'angle qb4 est la même pour le premier et le second
choix, cela est dû au fait que la matrice jacobienne réduite
présente quatre lignes identiques ce qui se répercute sur le
résultat d'inversion de la matrice.
Nous avons pu constater que lorsque le déterminant du
système Det( J) diminue considérablement
jusqu'à être proche du zéro, alors, le comportement du
système articulé s'en ressent, même si le
déterminant du bras manipulateur
Det(J.JT) ne présente
particulièrement pas de résultats proches du zéro.
Nous allons dans ce qui suit commenter les résultats pour
chaque type de tâche additionnelle considérée.
o Choix numéro 1
Au niveau de l'itération numéro 38, nous
remarquons une évolution brusque pour les vitesses articulaires ; cela
coïncide avec le fait que le déterminant lié au
système frôle la valeur nulle, ce qui correspond à une
perte de rang dans la matrice jacobienne réduite, et de là le
système est considéré comme étant à
proximité d'une singularité. A ce niveau, les vitesses obtenues
dépassent les vitesses admissibles par les variables
généralisées.
En imposant la vitesse angulairesØ &
=0.012 relative au système articulé seul, nous remarquons
d'après Fig.VI.48 que nous évitons une augmentation brusque des
vitesses articulaires jusqu'à dépasser les limites admissibles.
Cela nous permet également de mieux commander le système, car
Ø& ne dépend pas de la vitesse de la
plateforme, et connaissant les vitesses généralisées
maximales, un choix de tâche additionnelle se faisant par rapport
à Ø & nous évite d'imposer une vitesse
supérieure à celle admise par le système.

Fig.VI.48. Présentation des
Déterminants
o Choix numéro 2
Ce choix de cette tâche additionnelle nous donne des
résultats très corrects, car Det( J) ne
frôle pas la singularité, aussi, les vitesses restent dans les
limites imposées par le système articulé ; mais en
introduction cette tâche, un inconvénient majeur se
présente, car un mauvais réglage dans la valeur de la vitesse
q& b1 nous ramène sur des vitesses
supérieures à celles
imposées par les système. o Choix
numéro 3
Ce choix donne des résultats très
médiocres, et cette tâche n'est pas intéressante car
Det( J) est nul, pour toute les configurations, ce qui fait
que la matrice perd effectivement un rang car la ligne ajoutée relative
à la vitesses opérationnelle X&E
est linéairement dépendante
avec une autre ligne appartenant à la jacobienne
réduite. V.8. Conclusion
Les résultats de la planification de trajectoire sont
très intéressants, vu que nous avons pu arriver à faire
suivre au système de manipulation mobile les trajectoires
opérationnelles imposées, en respectant le fait d'éviter
les butées articulaires, qui peuvent présenter un facteur
prépondérant. L'inconvénient majeur de l'approche
proposée est qu'il y a un certain nombre de paramètres qu'il faut
régler selon le type de trajectoire imposée, comme la distance
entre échantillons de référence, l'estimée pour les
systèmes articulés, ou encor, le rayon des échantillons de
référence. Nous avons également constaté que la
position de la plateforme mobile est un facteur prépondérant
influençant la trajectoire généralisée du
système articulé, obtenue après inversion du modèle
géométrique.
La méthode des tâches additionnelles est en
adéquation avec la méthode de planification de trajectoire que
nous avons adopté, nous avons eu à intégrer qu'une seule
ligne comme contrainte en vitesse, les résultats que nous avons obtenu
sont fort intéressants, puisque contrairement aux plateforme
différentielles portant un bras manipulateur [Fou98], une plateforme de
type voiture n'admet en aucun cas l'intégration d'une vitesse
opérationnelle X& E ,
Y&E ou
Z& E. Ceci nous permet de
considérer que la méthode des tâches
additionnelles est très pratique, mais elle doit
être manipulée avec une grande prudence, elle dépend du
système à étudier. Une étude préalable
concernant la matrice jacobienne réduite peut nous éviter des
résultats médiocres.
| 
