Annexes
Annexe A : Modèle géométrique
Direct du système
articulé
Nous allons illustrer dans cette annexe les principales
étapes de calcul du modèle géométrique direct d'un
bras manipulateur, en utilisant la représentation de DenavitHartenberg,
ensuite nous présenterons les expressions analytiques des
coordonnées cartésiennes du bras Mitsubishi PA10 7CE.
A.1. Calcul du modèle géométrique
direct d'un bras manipulateur
Le modèle géométrique direct d'un bras
manipulateur a comme but de représenter la position et l'orientation de
l'organe terminal, relativement au repère se trouvant à la base
du bras manipulateur (OB0,x r 0,y r
0,zr0) d'après
Fig.A.1.
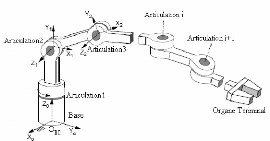
Fig.A.1 : Système de repérage relatif aux
articulations d'un bras manipulateur
L'élaboration du modèle
géométrique direct doit être accomplie en utilisant une
certaine paramétrisation des repères liés à chaque
articulation[Flü98] ; notre choix s'est porté sur celle de
Denavit-Hartenberg [Yam94] [Khl99] puisque c'est la plus utilisée, elle
est illustrée schématiquement en Fig.A.2 .
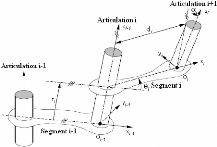
Fig.A.2 : Paramètres de
Denavit-hartenberg
Cette notation nous permet de représenter les
déplacements de l'articulation i relativement à
l'articulation i-1, grâce à une matrice de transformation
d'espace i-1Ti.
Sin( á
i i
)Sin( )
è
-
0 d
Sin( )
è i
Cos()Cos á i
i i i i i
Cos( )
è i
i1- Ti
Cos(á
Sin( )Sin( )
á è
i i
0
1
i
( ) Sin( ) r Sin( ) Ò
è á è
(A.1)
i i i i
- - ?
)Cos( ) Cos( ) r Cos( )
è á è ?
0 0 1 J
?
Comme cela est présenté en Fig.A.2, le passage du
repère Ri-1 au repère Ri s'exprime
en fonction de quatre paramètres [Yam94] [Khl99]:
ái : Angle entre les axes zi et
zi-1 correspondant à une rotation autour de
xi
di : Distance entre zi-1 et zi
le long de xi-1
èi : Angle entre les axes
xi-1 et xi correspondant à une rotation
autour de zi
ri : Distance entre xi-1 et
xi le long de zi
La position et l'orientation de l'organe terminal par rapport au
repère de référence seront donc calculées selon le
produit matriciel suivant :
0 T T . T .... - T
= (A.2)
0 1 n 1
n 1 2 n
La matrice de transformation d'espace résultante illustre
mathématiquement la situation de l'Organe Terminal relativement à
un repère de référence.

1
?
?
?
J
(A.3)
r x
u v
x x
w x
r y
w y
u y
v y
r z
u v
z z
w z
0 0 0 1
? ? ? ? ?
0Tn=
Les positions de l'organe terminal seront déduites de la
matrice présentée en (A.3) telles que :
XE=rx (A.4)
YE=ry (A.5)
ZE=rz (A.6)
Pour les rotations, nous allons utiliser une
représentation non redondante, c'est à dire avec trois
paramètres [Bay0 1] seulement, comme les angles d'Euler classiques
[Khl99] tels que:
r ATAN 2 w , w
x y
Ö ( )
( ) (A.7)
-
= ? - = + °
? ATAN 2 w , w 180
Ö
x y
È = ATAN 2 Sin Ö w x - Cos
Ö w y , w z
( ( ) ( ) ) (A.8)
Ø Ö Ö Ö Ö
= - - +
ATAN 2 Cos v Sin v , Cos u Sin u
( ( ) ( ) ( ) ( ) ) (A.9)
x y x y
Les matrices de transformations d'espaces sont utiles pour la
construction du modèle géométrique, où il est
adéquat de représenter l'évolution spatiale d'un corps
d'intérêt (dans le cadre de notre étude c'est l'
OT), relativement à un repère de
référence.
Tout au long de ce mémoire, nous avons
considéré les variables è liées aux
articulations du système articulé, comme étant les
coordonnées généralisées qbi
avec i=1 ...í (í étant le nombre
d'articulations appartenants au bras manipulateur).
A.2. Forme analytique du modèle
géométrique direct du bras Mitsubishi PA10 7CE : A.2.1. Matrices
de passage des différents repères du bras Mitsubishi PA10
7CE:
Les différentes matrices de passages relatives à
chaque articulation sont :
|
0T1=
|
-
C S 0 0 1
1 1
SC 0 0 Ò
1 1 Ò
,
0 0 10 Ò
?
|
1T2=
|
C2
0
S 2 0
|
0 0 0 1 J
, 2T3=
0 0 1 R
- - 3
S C 0 0
3 3
0 0 0 1
1 ? ? ? ? J
S 0 0
2
0 10
C 0 0
2
-
0 01
C 3
S 0 0
3
,
1 ? ? ? ? J

C S 0 0
4 4
-
C S 0 0
5 5
-
0 0 1
-
0 0 10
, 5T6=
, 4T5=
.
T4=
,6 T7=
3
R5
0 0
S C
4 4
-
S C
5 5
1 ? ? ? ? J
0 0 0 1
0 0 01
1 ? ? ? ? J
1 ? ? ? ? J
00
1 ? ? ? ? J
00
C S 0 0
7 7
-
0 0 1 0
-
S C 0 0
7 7
0 0 0 1
C S 0 0
6 6
-
0 0 1 0
S C
6 6
-
0 0 0 1
Sachant que Ri représente le paramètre
ri utilisé dans l'équation (A. 1) ; les symboles Si
et Ci désignent les sinus et cosinus de lange
qbi.
A.2.2. Matrice de transformation d'espace globale :
· Les deux premières colonnes :
C C C C C C C - C C C C S S - C C C S S C
7 6 5 4 3 2 1 7 6 5 4 3 1 7 6 5 4 2 1
- C C S S C C - C C S C S - C S S C C C
7 6 5 3 2 1 7 6 5 3 1 7 6 4 3 2 1
S C C C C C C S C C C S S
7 6 5 4 3 2 1 7 6 5 4 3 1
+
+ +
S C C S S C S C S S C C
7 6 5 4 2 1 7 6 5 3 2 1
+ C S S S S - C S C S C
7 6 4 3 1 7 6 4 2 1
- S S C C C C
7 5 4 3 2 1
+ +
S C S C S S S S C C C - S S S S S
+ +
S S C S S S S S S C - S C C S
7 5 4 3 1 7 5 4 2 1 7 5 3 1
7 6 5 3 1 7 6 4 3 2 1 7 6 4 3 1
S S C S C
7 6 4 2
+ +
1 7 5 4 3 2 1 7 5 4 3 1
- C S C C C C C S C S S
.
- S C S C C
7 5 3 2 1
+ C S S S C
7 5 4 2 1
- C C S C C - C C C S
7 5 3 2 1 7 5 3 1
+ S 7
C C C C C C S C C C C S C
7 6 5 4 3 2 1 7 6 5 4 3 1
+
- C C C S S S
7 6 5 4 2 1
- S C C C C C S - S C C C S C
7 6 5 4 3 2 1 7 6 5 4 3 1
C C S S S
6 5 4 2 1
C C S S C S C C S C C
7 6 5 3 2 1 7 6 5 3 1
+
- C C S C C S
7 6 5 3 2 1
+ +
S C S S C S - S C S C C S
7 6 5 3 2 1 7 6 5 3 1 7
S S C C S
6 4 3 2 1
C S S S C
7 6 4 3 1
- C S C S S
7 6 4 2 1
- S S C C C S
7 5 4 3 2 1
S S C S C S S S S S
7 5 4 3 1 7 5 4 2 1
+
- S C S C S
7 5 3 2 1
+ +
S C S S - C S C C C S
6 4 2 1 7 5 4 3 2 1
+ C 7
C C C
5 3 1
+ S C C C
7 5 3 1
S S S S C S
7 6 4 3 1 7
C C S C S
7 5 3 2 1
C S C S C C S S S S
7 5 4 3 1 7 5 4 2 1
+
- C C C C C S - C C C S C C C S S S
7 6 5 4 3 2 7 6 5 4 2 7 6 5 3 2
+
+ +
C S S C S - C S C C S S C C S
7 6 4 3 2 7 6 4 2 7 5 4 3 2
+ +
S S S C S C S S
7 5 4 2 7 5 2 3 S C C C C S S C C S C - S C S S S
7 6 5 4 3 2 7 6 5 4 2 7 6 5 3 2
+
S S S C S S S C C - C S C C S
7 6 4 3 2 7 6 4 2 7 5 4 3 2
+
C S S C C C S S
7 5 4 2 7 5 2 3
+
0 | 0
· Les deux dernières colonnes
:
R S C C C
5 4 3 2 1
+ R C S
3 1 2
- R S S S R C S C
5 4 3 1 5 4 2 1
+
- S S S C C
6 5 3 2 1
- C S S S C C S C
6 4 3 1 6 4 2 1
+
S C C C C C
6 5 4 3 2 1
- S S C S C S C C C
6 5 3 1 6 4 3 2 1
+
- S C C S S S C S S C
6 5 4 3 1- 6 5 4 2 1
S C C C C S S C C S C - S C S S S
6 5 4 3 2 1 6 5 4 3 1 6 5 4 2 1
+
S S S C S S S C C C S C C S
6 5 3 2 1 6 5 3 1 6 4 3 2 1
+ +
+ +
C S S C C C S S
6 4 3 1 6 4 2 1
- S C C C S
6 5 4 3 2
- S C S C S S S S
6 5 4 2 6 5 3 2
+
- C S C S C C C
6 4 3 2 6 4 2
+
R S C C S R S S C R C S S
5 4 3 2 1 5 4 3 1 5 4 2 1
+ +
+ R S S
3 2 1
-R5S4C3S2 +R5C4C2
+R3C2
0 | 1
Nous déduisons les coordonnées
opérationnelles cartésiennes de l'organe terminal, relativement
au repère (OB0 , x r B 0 , y r B0 , z
r B0) d'après la matrice présentée dans
le
paragrapheA.2.2 telles que :
XE = R5S4C3C2C1-R5S4S3S1+R5C4S2C1+R3C1S2
YE= R5S4C3C2S1+R5S4S3C1+R5C4S2S1+R3S2S1 ZE =
-R5S4C3S2+R5C4C2+R3C2
| 
